📝 Paper Summary
Memory recall
Memory organization
Self-evolving Agentic reasoning
CMMR-VLN enables navigation agents to continually improve by retrieving past multimodal experiences to guide current decisions and selectively updating memory with successful routes or key failure reflections.
Core Problem
LLM-based navigation agents lack the ability to recall and utilize relevant prior experiences, often leading to random choices at ambiguous forks or repeating past mistakes in long-horizon tasks.
Why it matters:
- Current agents fail to adapt to unfamiliar environments over time, unlike humans who become experts through accumulated experience
- Without structured memory, LLMs struggle to ground their vast general knowledge into specific spatial contexts, causing inconsistent decision-making
- Purely reactive LLM agents often lack the structured logic required to maintain coherence across long navigation trajectories
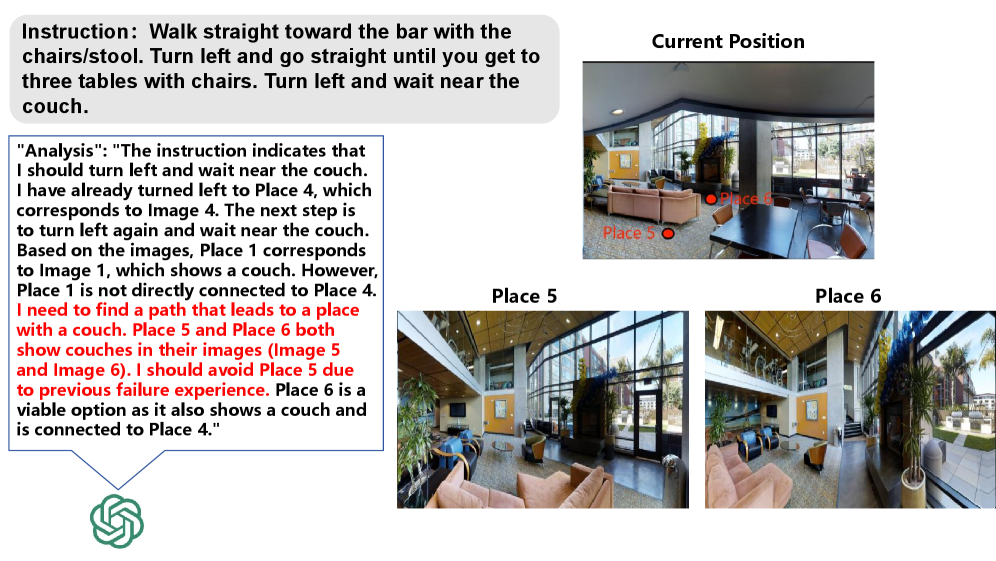
Concrete Example:
When instructed to 'turn left again and wait near the couch,' an agent might see two similar rooms with couches (Place 5 and Place 6). Without memory, it guesses randomly. CMMR-VLN recalls a prior failure at Place 5 and explicitly reasons to choose Place 6 to avoid repeating the mistake.
Key Novelty
Continual Multimodal Memory Retrieval (CMMR)
- Constructs a memory bank of panoramic images and text landmarks, indexed by CLIP embeddings, allowing the agent to retrieve 'rules' derived from past similar situations
- Implements a reflection mechanism that updates memory differently for success (storing full paths) versus failure (storing only the specific decision point and error type of the first mistake)
Architecture
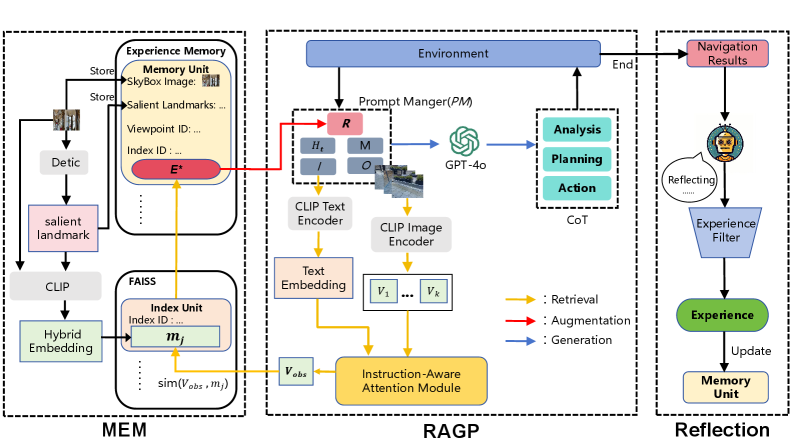
The overall CMMR-VLN framework, including memory construction, the retrieval-augmented generation pipeline (RAGP), and the reflection mechanism.
Evaluation Highlights
- +52.9% improvement in Success Rate (SR) over NavGPT on the R2R validation unseen split
- +50% improvement in Success weighted by Path Length (SPL) over MapGPT on the R2R validation unseen split
- +200% improvement in Success Rate (SR) over NavGPT in real-world TurtleBot 4 Lite tests
Breakthrough Assessment
7/10
Significant performance jumps over LLM-based baselines and effective transfer to real robots. The distinct handling of success (full path) vs. failure (key error) memory is a clever, human-inspired design choice.