📊 Experiments & Results
Evaluation Setup
Four MuJoCo-v5 environments (HalfCheetah, Hopper, Walker2d, Ant) under induced sensor drift
Benchmarks:
- HalfCheetah-v5 (Locomotion)
- Hopper-v5 (Locomotion (fragile))
- Walker2d-v5 (Locomotion)
- Ant-v5 (Locomotion)
Metrics:
- Detection Rate (at various drift intensities)
- Survival Gap (Time to collapse - Time to detection)
- Statistical methodology: Wilson score 95% confidence intervals; R^2 for power law fits
Key Results
| Benchmark | Metric | Baseline | This Paper | Δ |
|---|---|---|---|---|
| Sinusoidal blindness results demonstrating that periodic drift is invisible to all detectors. | ||||
| All environments | Detection Rate (Sinusoidal Drift) | ~100 | ~0 | -100 |
| Power law fit results showing predictability of thresholds within environments but failure across environments. | ||||
| Within-Environment Fit | R^2 | 0.0 | 0.97 | +0.97 |
| Cross-Environment Fit | R^2 | 0.89 | 0.45 | -0.44 |
| Collapse Before Awareness (CBA) analysis in Hopper. | ||||
| Hopper | Survival Gap (steps) | 0 | -25 | -25 |
Experiment Figures
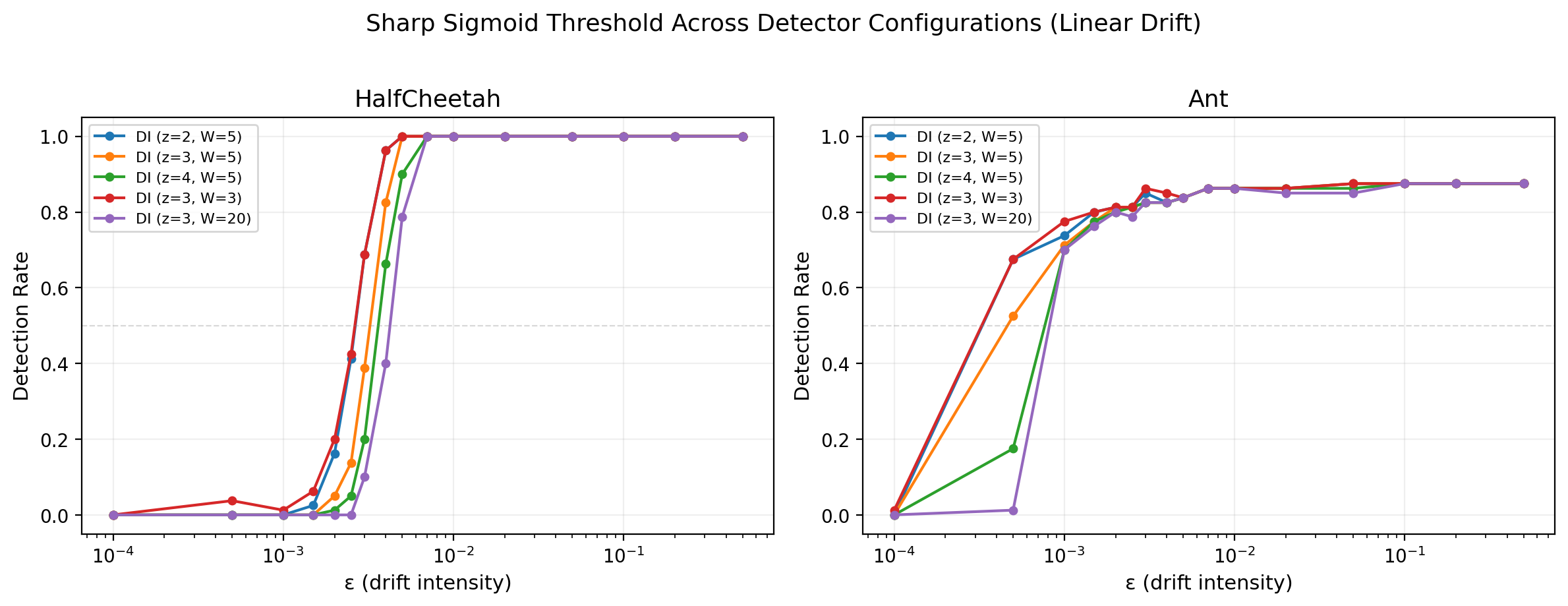
Sigmoid detection curves for linear vs. sinusoidal drift across intensities
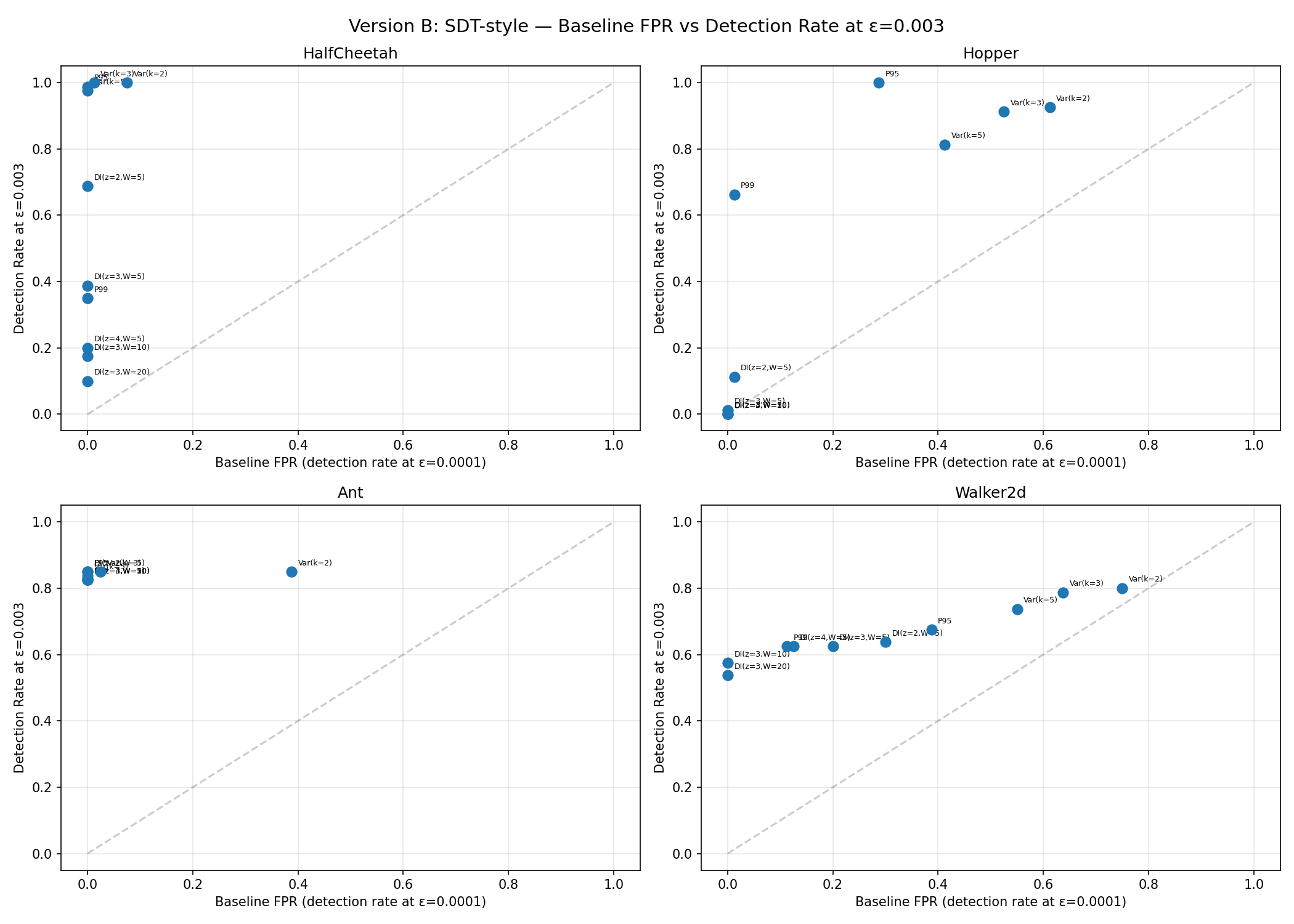
Signal Detection Theory (FPR vs Detection Rate) scatter plot for all detectors
Main Takeaways
- A sharp 'Boiling Frog' detection threshold exists universally; below it, drift is absorbed as normal noise, above it, detection is rapid.
- Sinusoidal drift is invisible because world models minimize prediction error by 'dreaming through' the oscillation, treating it as aleatoric variance.
- The detection threshold ε* is not determined by model quality (MSE) but by an interaction of detector sensitivity and environment-specific noise structure (tail heaviness).
- Increasing world model capacity (Small -> Large) reduces baseline MSE but does NOT change the detection threshold ε*, as detection is relative to the learned noise floor.