📝 Paper Summary
Autonomous Driving (AD)
Large Language Models (LLMs) in Robotics
Neuro-symbolic AI
This survey identifies the lack of robust reasoning as the primary bottleneck in autonomous driving and proposes a three-level Cognitive Hierarchy to guide the integration of LLMs as a central cognitive engine.
Core Problem
Autonomous driving systems have mastered structured perception and control but consistently fail in long-tail, complex social scenarios due to a deficit in robust, generalizable reasoning.
Why it matters:
- The bottleneck in AD has shifted from sensing physical limitations to 'planning discrepancy,' where systems fail to understand context
- Current modular pipelines (Perception → Prediction → Planning) suffer from information loss and cannot handle implicit social rules
- Without human-like reasoning, vehicles cannot safely navigate unpredictable scenarios like construction zones or non-verbal negotiation with pedestrians
Concrete Example:
When a ball rolls onto a street, a standard perception system detects 'ball' and 'road.' A reasoning-enabled system uses commonsense to infer a 'hidden child likely following' and preemptively slows down—a capability often missing in purely rule-based or reactive AD systems.
Key Novelty
The Cognitive Hierarchy Framework
- Deconstructs driving into three levels of increasing complexity: (1) Sensorimotor (reflexive control), (2) Egocentric Reasoning (planning relative to other agents), and (3) Social-Cognitive (negotiation and commonsense)
- Proposes elevating reasoning from a modular component to the 'Cognitive Core' of the system, using LLMs to coordinate perception and control rather than just processing text
- Systematizes seven core reasoning challenges, including the 'Responsiveness-Reasoning Tradeoff' and 'Social-Game Reasoning'
Architecture
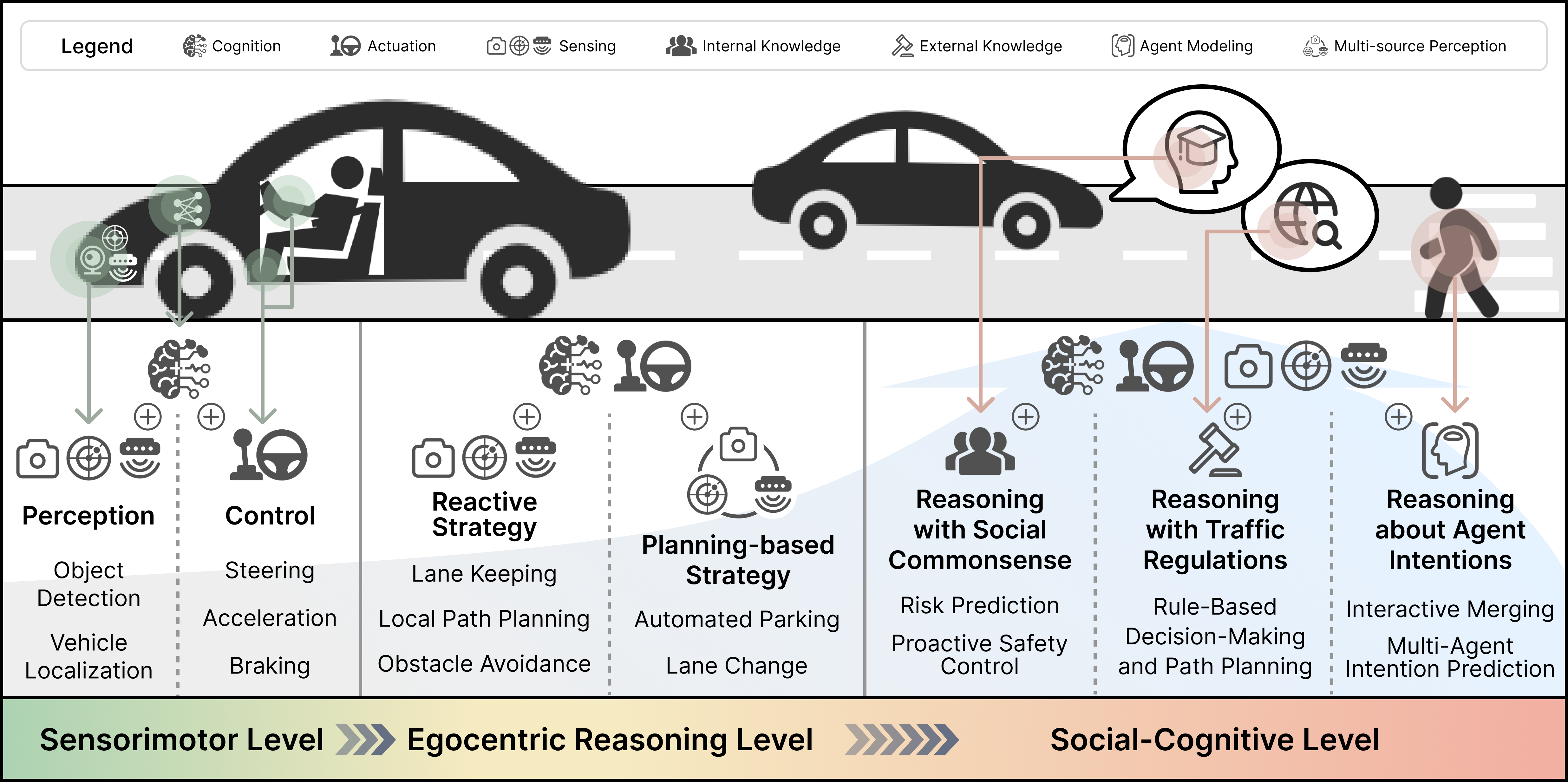
The proposed Cognitive Hierarchy framework deconstructing the autonomous driving task
Breakthrough Assessment
7/10
A significant conceptual contribution that structures the chaotic landscape of LLM-based driving. While it offers no new algorithm, the 'Cognitive Hierarchy' provides a necessary roadmap for moving beyond Level 2/3 autonomy.