📝 Paper Summary
Robotic Manipulation
Soft Robotics
Hardware Design
CRAFT is a low-cost, open-source robotic hand that localizes soft materials at joints to absorb impact while keeping links rigid for precise force transmission, enabling robust contact-rich manipulation.
Core Problem
Robotic hands face a tradeoff between precision and robustness: rigid hands break under contact or demand complex control, while soft hands lack the structural rigidity for precise, repeatable kinematics.
Why it matters:
- Contact is the dominant failure mode in robot learning; rigid hands often break during data collection collisions
- Soft hands deform unpredictably under load, making their motion difficult to model and control for precision tasks
- Existing solutions are either prohibitively expensive ($15k+) or lack the anthropomorphic dexterity needed for general-purpose manipulation
Concrete Example:
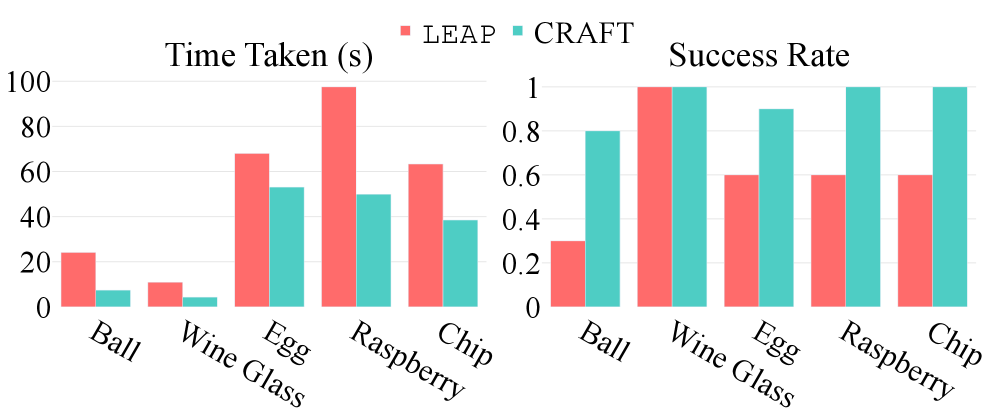
When grasping a fragile wine glass, a rigid hand like LEAP requires users to move slowly and hesitantly to avoid shattering it, whereas CRAFT's compliant joints passively conform to the glass, allowing faster, confident grasping.
Key Novelty
Hybrid Hard-Soft Compliance with Rolling-Contact Joints
- Places soft TPU material only at joints where impacts concentrate, while using rigid PLA for links to reliably transmit tendon forces
- Uses rolling-contact joint geometry instead of simple flexures to distribute stress and prevent fatigue failure
- Couples PIP and DIP joints with a bidirectional linkage so they bend simultaneously and equally, solving the unpredictability problem of soft fingers
Architecture
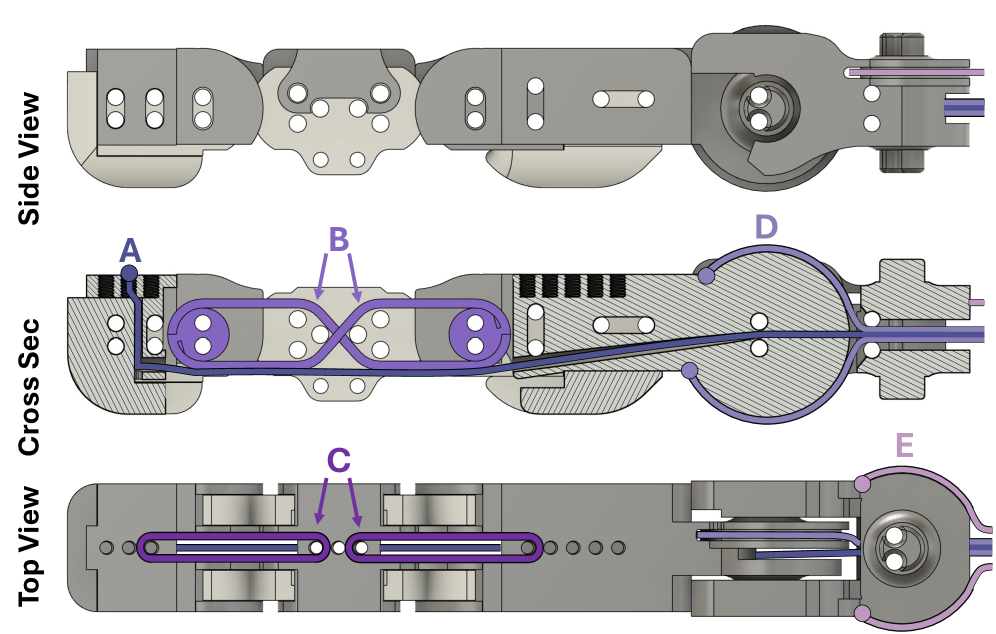
Exploded view and cross-section of the CRAFT finger design
Evaluation Highlights
- Achieved 100% success rate on fragile/delicate tasks (raspberry, chip) where rigid baseline failed 60% of the time
- Doubled pull-out strength (15.29 N vs 8.67 N) compared to rigid LEAP hand using identical motors
- Full coverage of 33/33 Feix grasp taxonomy types, surpassing prior soft hands like RUKA (29/33)
Breakthrough Assessment
8/10
Significant practical contribution: solves the fragility/precision tradeoff in low-cost hardware ($600). Excellent validation across structural, manipulation, and taxonomic benchmarks.