📝 Paper Summary
Autonomous Driving (AV) Personalization
Driving Style Adaptation
MAVERIC learns a latent embedding of a driver's style to tune autonomous vehicle controllers, allowing it to mimic the user or modulate aggression while maintaining their unique driving characteristics.
Core Problem
Autonomous vehicles (AVs) often use one-size-fits-all driving styles that decrease user acceptance, but simply mimicking a user's style is insufficient because users may prefer driving that is safer or different from their own.
Why it matters:
- Personalization significantly increases trust and acceptance of AVs, which is critical for adoption.
- Prior approaches either only mimic users (ignoring preference for safer driving) or tune general aggression (ignoring individual style nuances like lane positioning).
- Understanding 'homophily' (preference for similarity) is complex; factors like personality and perceived safety modulate whether users actually want an AV to drive like them.
Concrete Example:
A user might drive aggressively (high speed, close following distance) but prefer their AV to drive cautiously. A standard mimicry system would copy the unsafe behavior, while a generic 'cautious' mode might lose the user's preferred lane-change timing. MAVERIC adjusts the aggression level while keeping the user's specific lane-change style.
Key Novelty
Latent Space Arithmetic for Driving Style
- Learns a personalized vector embedding that captures a user's driving style using an information-maximizing neural network.
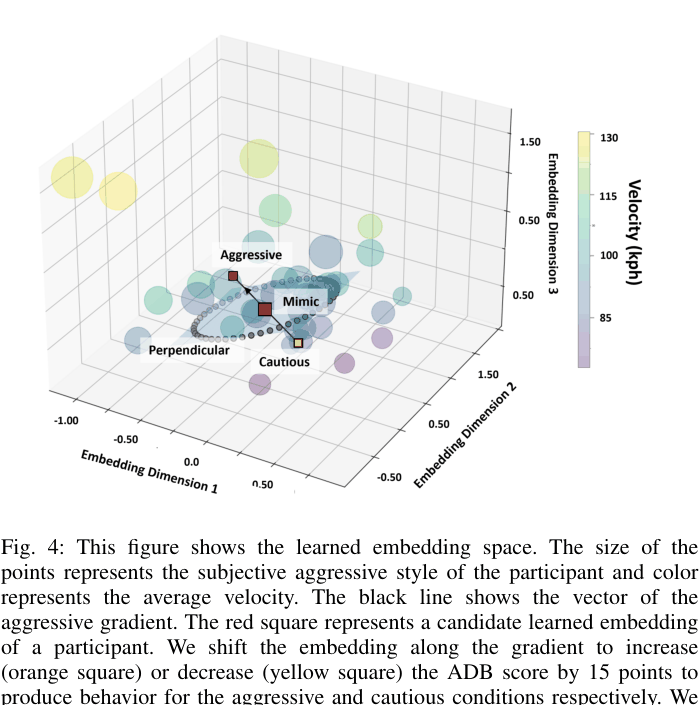
- Explicitly adds a 'gradient of aggression' to the embedding space by training a sub-network to predict subjective aggression scores.
- Modulates driving style by shifting the user's embedding vector along this aggression gradient, producing new controller parameters that are 'more aggressive' or 'more cautious' versions of that specific user.
Architecture
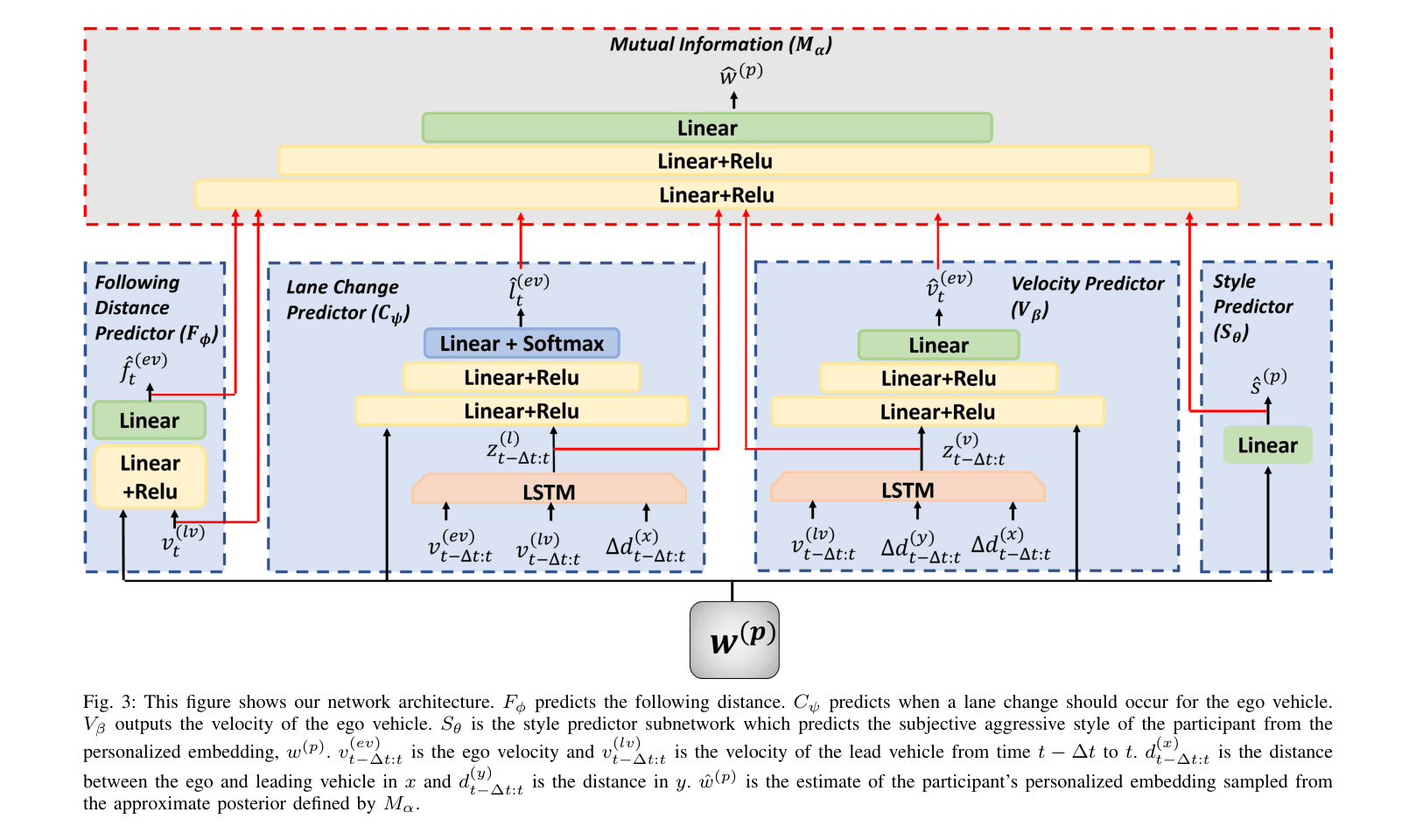
Neural network architecture diagram showing the encoder (Mutual Information M_phi) and four predictor heads (Following Distance, Lane Change, Velocity, Style).
Evaluation Highlights
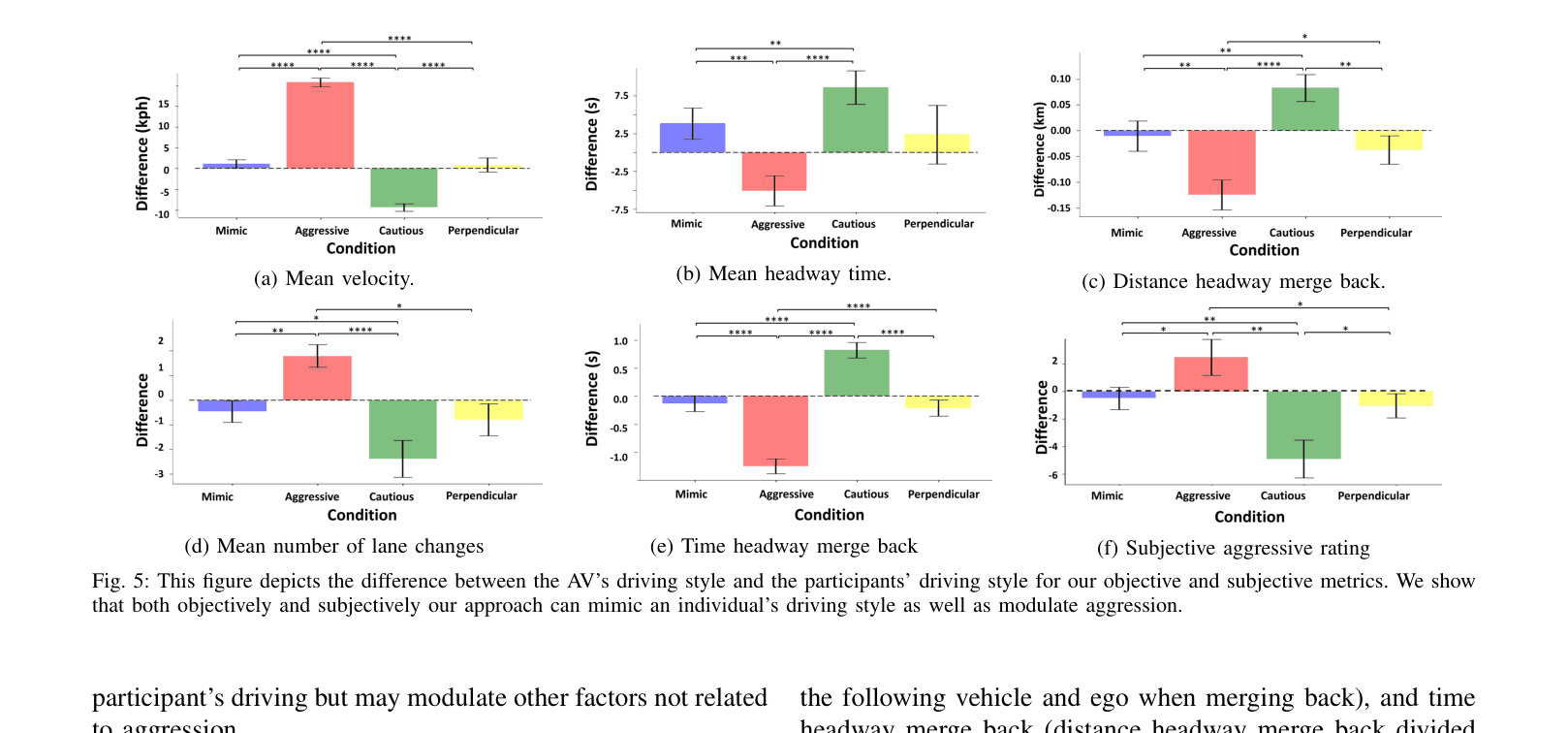
- Mimic condition matches user velocity with 93.6% accuracy and distance headway with 92.4% accuracy.
- Subjective aggression ratings significantly differentiate the generated styles: 'Cautious' rated significantly less aggressive than 'Mimic' (p=0.002).
- Personality traits modulate preference: Conscientious users significantly prefer 'Cautious' driving over 'Mimic' (r=0.46 correlation with discomfort reduction).
Breakthrough Assessment
6/10
Novel approach to disentangling 'aggression' from other style factors in latent space. Strong user study, but limited technical complexity in the underlying model and simulator environment compared to state-of-the-art scaling.