📝 Paper Summary
Personalized autonomous driving
Episodic memory in agents
Linear memory organization
Talk2Drive integrates LLMs and a memory module into real vehicles to translate verbal commands into executable control codes, adapting to driver preferences by learning from historical feedback.
Core Problem
Traditional autonomous driving systems fail to understand abstract verbal commands (e.g., 'I'm in a hurry') and lack mechanisms to personalize driving behaviors based on historical driver preferences.
Why it matters:
- Standard systems rely on rigid, numerical configurations that cannot adapt to the nuanced, context-dependent needs of different human drivers.
- Current personalization frameworks often struggle with unseen scenarios and lack the semantic understanding to interpret indirect speech acts (hints) effectively.
- Most LLM-based driving research is confined to simulation, leaving a gap in understanding how these models perform with real-world vehicle dynamics and safety constraints.
Concrete Example:
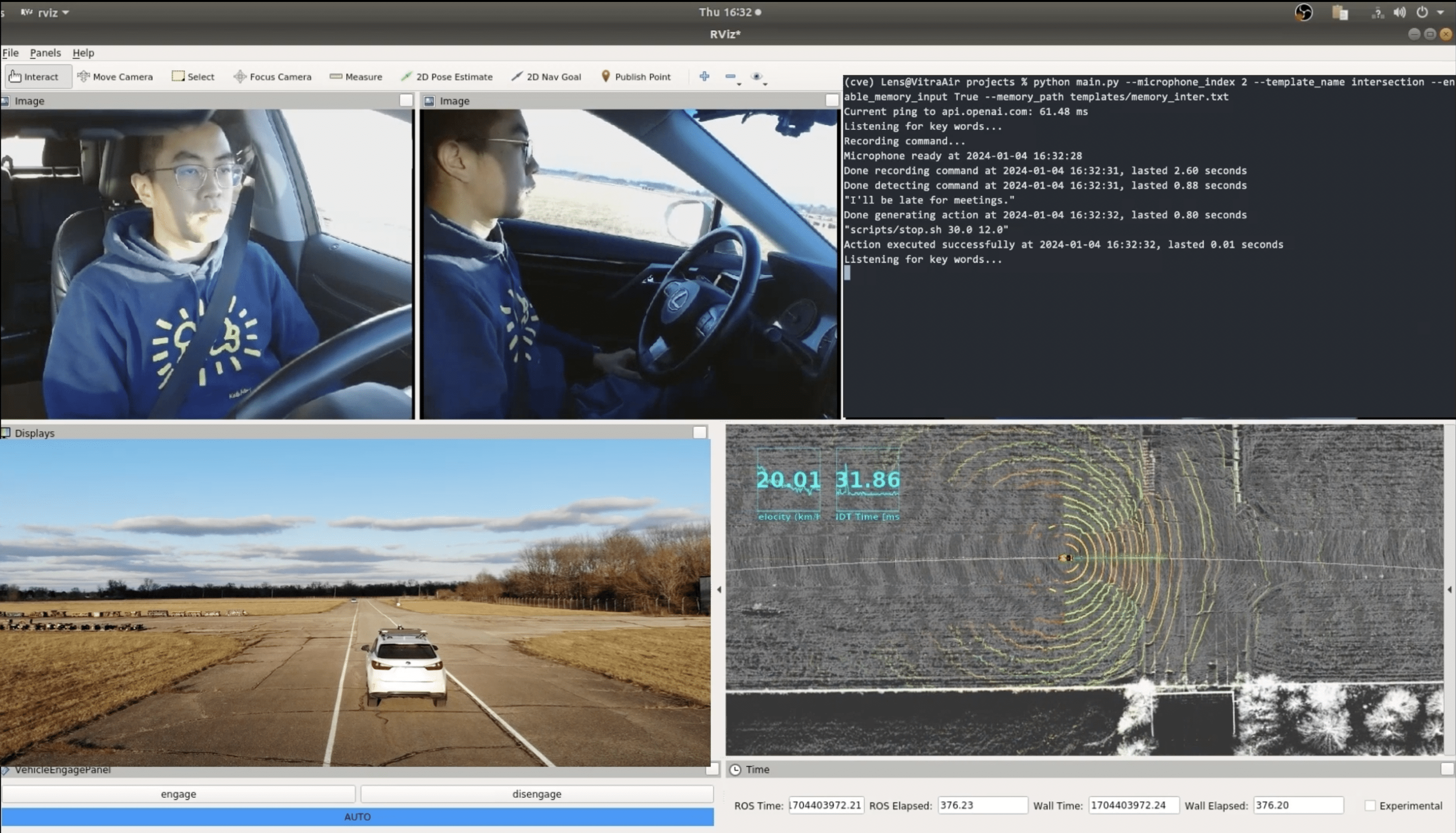
A driver saying 'I am really in a hurry now' requires the car to increase speed and aggressiveness. A traditional system ignores this abstract hint. Talk2Drive interprets the urgency, checks safety limits, and generates code to increase target velocity.
Key Novelty
Talk2Drive Framework with Verbal-to-Code Memory
- Translates spoken commands into 'Language Model Programs' (executable parameter adjustments) rather than just selecting pre-defined discrete actions.
- Implements a memory module that stores interaction triples (Command, Policy, Feedback) to refine future generations based on past user satisfaction.
- Demonstrates the first known end-to-end implementation of an LLM-based personalization system controlling a real-world full-scale autonomous vehicle.
Architecture
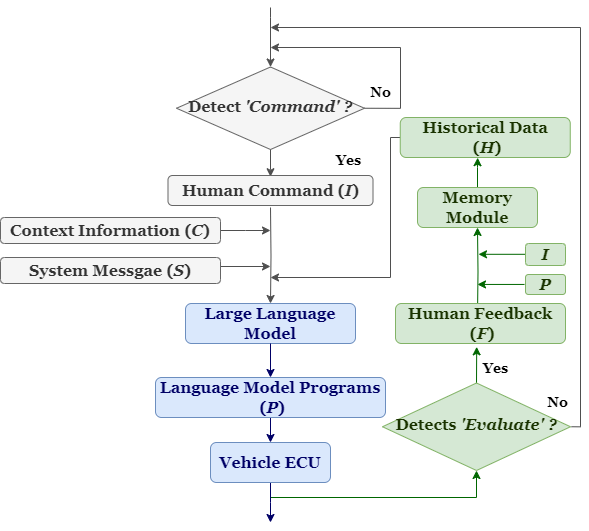
The flowchart of the Talk2Drive system processing a command from speech to execution.
Evaluation Highlights
- Reduces driver takeover rate by 75.9% in real-world scenarios compared to the baseline autonomous system, indicating significantly higher trust.
- The memory module further reduces the takeover rate by up to 65.2% compared to the LLM system without memory, demonstrating effective personalization.
- Successfully handles variable command directness, from explicit instructions ('drive faster') to non-conventional hints ('I hope we're not late'), in highway and parking settings.
Breakthrough Assessment
8/10
High score for being the first field deployment of LLMs for AD personalization on a real vehicle. The results in takeover reduction are significant, though the scope is limited to specific scenarios.