📝 Paper Summary
User-profile based personalization
LLM-based recommendation
Agentic AI
TidyBot uses the few-shot summarization capabilities of Large Language Models to infer generalized, personalized household cleanup rules from a small number of user examples.
Core Problem
Robots need to tidy up rooms according to highly variable, personalized user preferences (e.g., 'shirts in drawer' vs. 'shirts in closet') without requiring large training datasets for each user.
Why it matters:
- Classical approaches require tedious manual specification of target locations for every object
- Generic rules averaged over many users fail to capture individual cultural or personal storage preferences
- Existing personalization methods (collaborative filtering, latent vectors) require expensive large datasets that may not generalize well
Concrete Example:
A user might want 'yellow shirts' in the drawer and 'dark purple shirts' in the closet. A standard system might put all shirts in one place, whereas TidyBot generalizes this to 'light clothes in drawer, dark clothes in closet'.
Key Novelty
Generalization via LLM Summarization for Robotics
- Leverages LLM text summarization to convert a few specific user examples (e.g., specific shirts) into generalized rules (e.g., 'dark clothing')
- Uses the summarized nouns as open-vocabulary labels for an image classifier (CLIP), bridging high-level text rules with visual perception
- Infers not just placement locations but also manipulation primitives (e.g., 'toss' vs. 'place') from text examples
Architecture
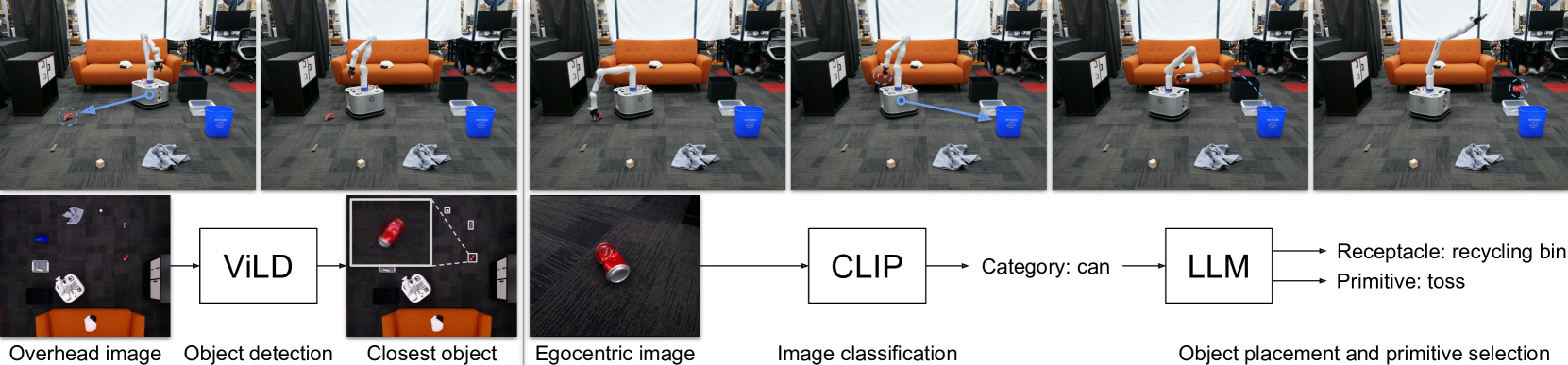
Conceptual illustration of the TidyBot pipeline.
Evaluation Highlights
- Achieves 91.2% accuracy on unseen objects in a new text-based benchmark, significantly outperforming baselines like WordNet (67.5%) and RoBERTa embeddings (77.8%)
- Real-world mobile manipulator (TidyBot) successfully puts away 85.0% of objects in physical test scenarios
- Demonstrates ability to generalize across diverse sorting criteria including category, attribute, function, and subcategory
Breakthrough Assessment
8/10
Novel application of LLM summarization to solve the specific robotic problem of personalized generalization. Strong real-world deployment and a new benchmark, though limited to specific cleanup tasks.