📝 Paper Summary
Conversational personalization
Control systems personalization
ChatMPC enables users to personalize control system specifications (like safety margins) in real-time by interpreting natural language feedback into parameter updates for Model Predictive Control.
Core Problem
Standard control systems use fixed specifications (like safety constraints) that do not adapt to individual user preferences or changing environments.
Why it matters:
- Traditional personalization requires tedious surveys or feedback loops that burden the user
- Real-time adaptation is difficult with standard data collection methods
- Fixed specifications fail to accommodate diverse user preferences (e.g., how close a robot should get to an object)
Concrete Example:
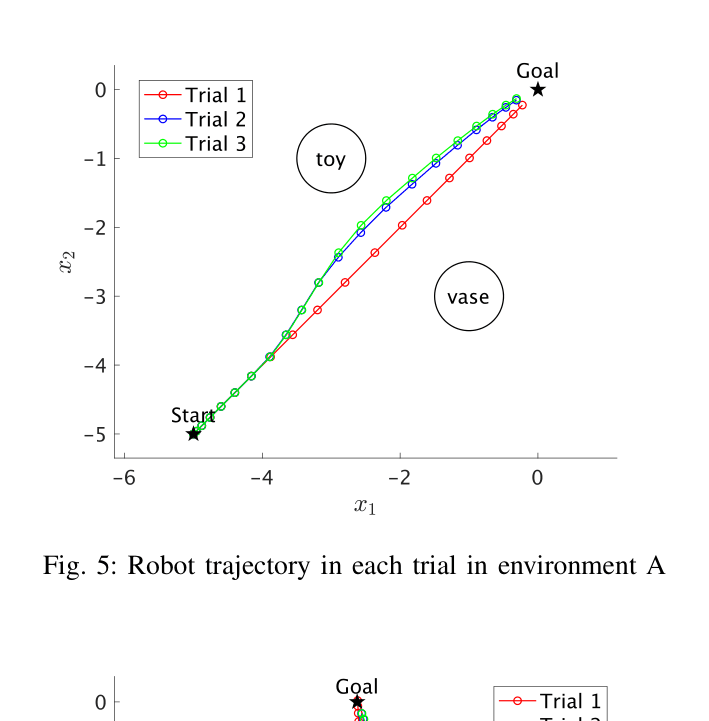
A robot navigates avoiding obstacles. One user might want it to stay far from a fragile vase, while another might prefer it ignores a sturdy toy to reach the goal faster. Without personalization, the robot treats both obstacles with the same rigid safety margin, potentially taking inefficient paths.
Key Novelty
Natural Language-driven MPC Parameterization
- Introduces a 'personalization loop' that runs alongside the standard control loop at a slower timescale
- Uses an 'Interpreter' module comprising a language model (Sentence BERT) to map user chat to specific control parameter updates
- Adjusts mathematical constraints (Control Barrier Functions) inside the MPC controller dynamically based on semantic intent (e.g., 'separate' vs. 'approach')
Architecture
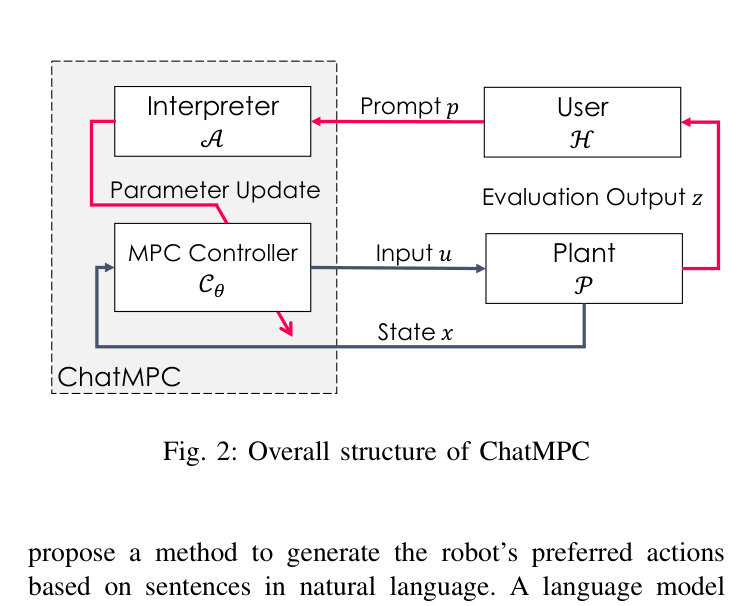
Overall structure of ChatMPC, illustrating the interaction between the Control Loop and the Personalization Loop.
Evaluation Highlights
- Successfully adjusted safety margins for distinct objects (vase vs. toy) based on prompts like 'Separate from the vase'
- Demonstrated real-time trajectory updates where the robot increased distance from fragile objects and decreased distance from non-fragile ones across 3 trials
- Showed consistent adaptation behavior across two different simulation environments (different obstacle placements)
Breakthrough Assessment
5/10
A proof-of-concept integrating LLMs with control theory. While the idea of controlling robots via language is established, applying it to persistenty update MPC constraint parameters is a neat niche application, though the experiments are simple simulations.