📝 Paper Summary
Assistive Robotics
Personalization (P13N)
FEAST is a modular mealtime-assistance robot that uses a large language model to safely translate user constraints into personalized behavior trees and custom gesture detectors for feeding, drinking, and wiping.
Core Problem
Existing mealtime-assistance robots rely on fixed policies or limited pre-defined customizations, failing to adapt to the diverse, changing needs of care recipients across different social contexts and physical conditions.
Why it matters:
- Millions worldwide require feeding assistance due to conditions like spinal cord injuries or cerebral palsy, imposing heavy workloads on caregivers
- Eating is deeply social and personal; one-size-fits-all robots can be obtrusive or socially inappropriate (e.g., blocking view of dining companions)
- Users' needs fluctuate daily (energy levels) and over time (progressive conditions), requiring systems that can adapt in-the-wild without expert reprogramming
Concrete Example:
A user with limited neck mobility needs food placed directly inside their mouth (inside-mouth transfer), while another user prefers leaning forward. In a social setting, one user might want the robot to retract immediately to see their friend, while another needs a custom 'long-open-mouth' gesture because their standard open-mouth gesture triggers falsely during conversation.
Key Novelty
LLM-Mediated Parameterized Behavior Trees for Safety-Critical Personalization
- Uses an LLM to translate natural language user requests into structured updates for robot behavior trees, allowing flexibility while maintaining safety via static validation
- Enables users to synthesize their own custom head-gesture detectors via LLM code generation (e.g., creating a 'long continuous open mouth' detector)
- Integrates modular hardware to support feeding, drinking, and mouth-wiping within a single system, adaptable to diverse physical setups (wheelchair or stand)
Architecture
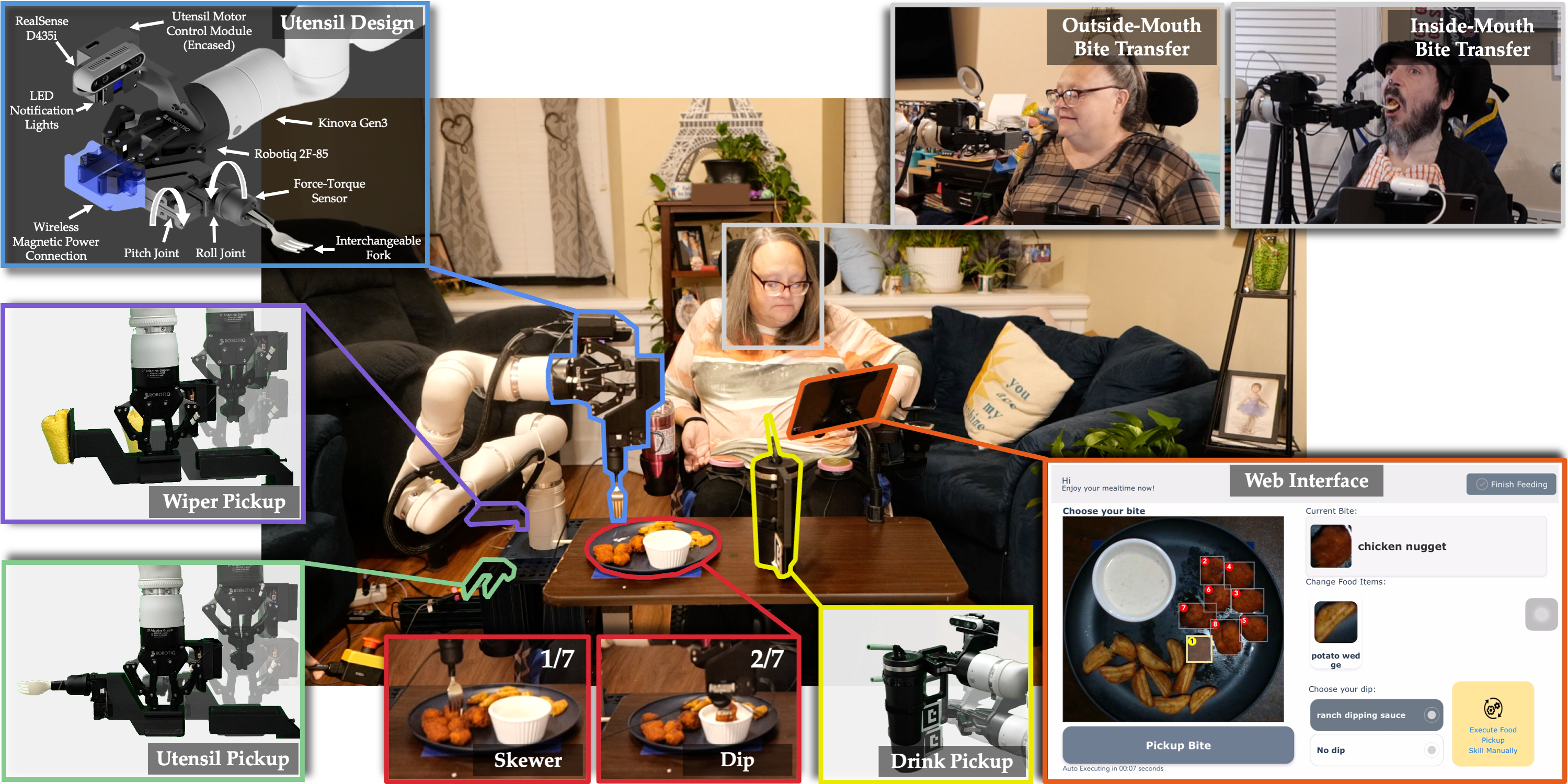
The FEAST hardware system components and their integration
Evaluation Highlights
- Formative study with 21 care recipients identified key personalization tenets: adaptability, transparency, and safety
- 5-day in-home evaluation with 2 community researchers (users with disabilities) across 3 distinct contexts (personal, TV, social)
- Users successfully fed themselves 6 meals each in real-world settings, reporting low cognitive workload on NASA-TLX surveys
Breakthrough Assessment
8/10
Strong contribution to assistive robotics by moving beyond fixed policies to LLM-driven in-the-wild personalization. The extensive user involvement (CBPR) and multi-day in-home testing significantly validate real-world applicability.