📊 Experiments & Results
Evaluation Setup
Evaluated on three distinct categories: UI Navigation (Digital), Robotic Manipulation (Physical), and Vision-Language Understanding.
Benchmarks:
- Mind2Web (UI Navigation)
- AITW (UI Navigation)
- Bridge (Robotic Manipulation)
- LIBERO (Robotic Manipulation)
- GQA (Visual Question Answering)
- VideoMME (Video Understanding)
- BLINK (Spatial Grounding)
Metrics:
- Success Rate
- Accuracy
- Statistical methodology: Not explicitly reported in the paper
Key Results
| Benchmark | Metric | Baseline | This Paper | Δ |
|---|---|---|---|---|
| Magma achieves SOTA results on agentic tasks in both digital and physical domains. | ||||
| UI Navigation / Robotic Manipulation | Performance | See paper (Specific numbers not in excerpt) | See paper (Specific numbers not in excerpt) | Positive (SOTA) |
| BLINK | Performance | Not reported in the paper | Not reported in the paper | Positive (SOTA) |
| Video Question-Answering | Performance | Not reported in the paper | Not reported in the paper | Positive (SOTA) |
Experiment Figures
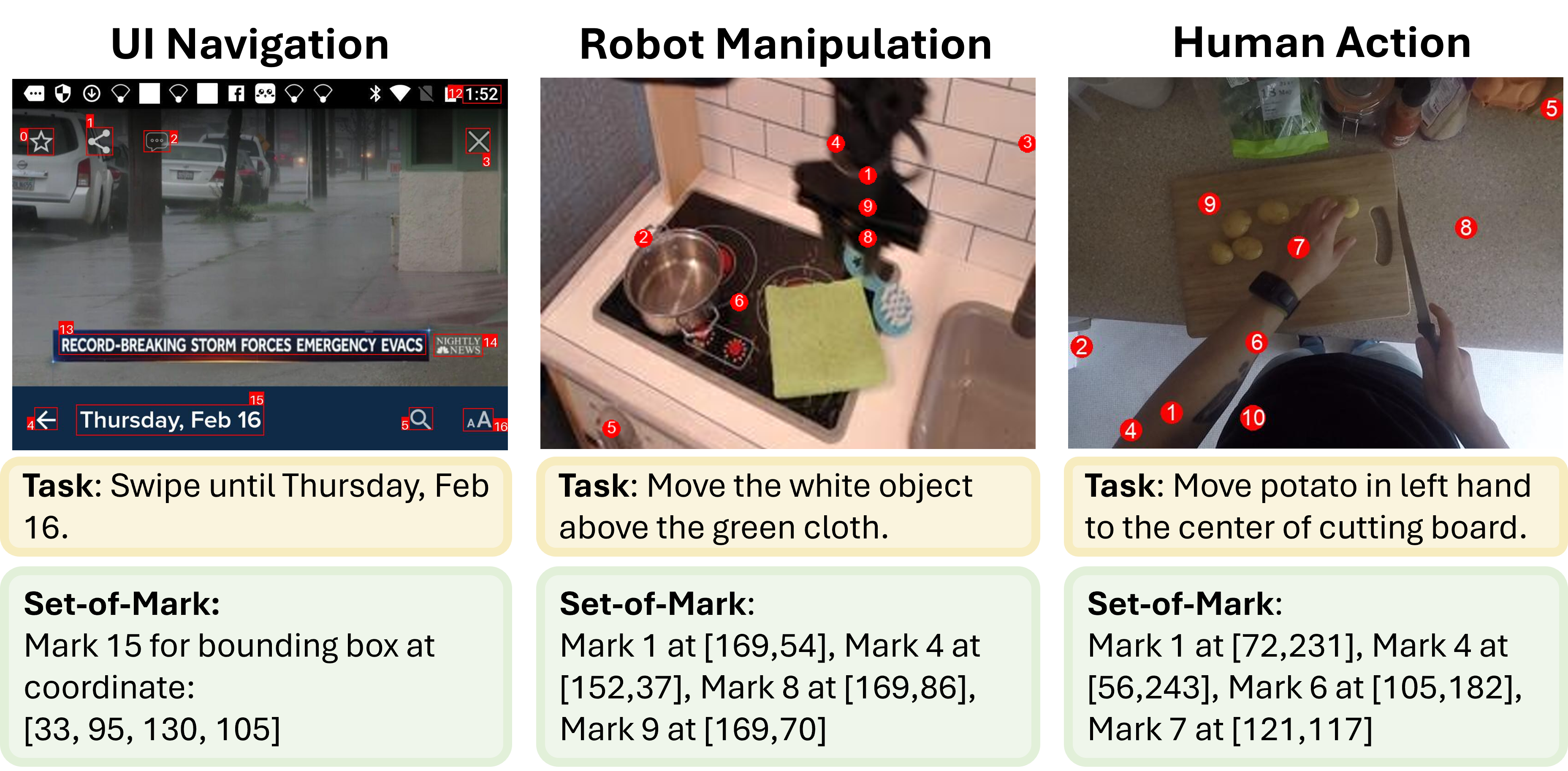
Visual examples of SoM-based action grounding.
Main Takeaways
- SoM and ToM enable effective synergy between digital (UI) and physical (Robotics) domains, allowing a single model to excel at both.
- Pretraining with trace prediction (ToM) on unlabeled videos significantly boosts spatial-temporal intelligence, allowing the model to learn dynamics without explicit action labels.
- The unified model maintains strong verbal intelligence (VQA tasks) comparable to dedicated LMMs, avoiding the catastrophic forgetting often seen in VLA models.
- The approach effectively scales up agentic pretraining by leveraging 39M samples from heterogeneous sources.