📝 Paper Summary
Multi-Agent Systems (MAS)
Coordination Mechanisms
This survey unifies multi-agent research across diverse domains by proposing a framework that categorizes coordination into answering two fundamental questions: 'who to coordinate with' and 'how to coordinate'.
Core Problem
Existing multi-agent surveys typically isolate coordination research by specific techniques (e.g., reinforcement learning) or narrow domains (e.g., autonomous driving), obscuring the fundamental mechanisms shared across different applications.
Why it matters:
- Researchers in emerging fields like LLM swarms often reinvent coordination strategies already solved in robotics or warehouse automation due to a lack of cross-domain knowledge transfer
- Diverse applications (satellites, humanoids, logistics) share underlying dependency problems, but terminology barriers prevent unified theoretical advancement
Concrete Example:
In Multi-Agent Path Finding (MAPF), a rule-based priority system might cause deadlocks where agents block each other indefinitely. A coordinated learning approach (like MAPPO) allows agents to negotiate, but often fails to scale. This survey connects these deadlock problems in robotics to similar 'live-lock' issues in LLM-based agent debates.
Key Novelty
The Who/How Unified Coordination Framework
- Proposes a cyclic framework where coordination is defined by three iterative steps: (1) Evaluate system performance, (2) Social choice on 'Who to coordinate with' (clustering), and (3) Decision on 'How to coordinate' (managing dependencies).
- Classifies diverse applications not just by task, but by how they answer the 'Who' (topology/grouping) and 'How' (learning/game theory) questions, bridging gaps between physical robot swarms and virtual LLM societies.
Architecture
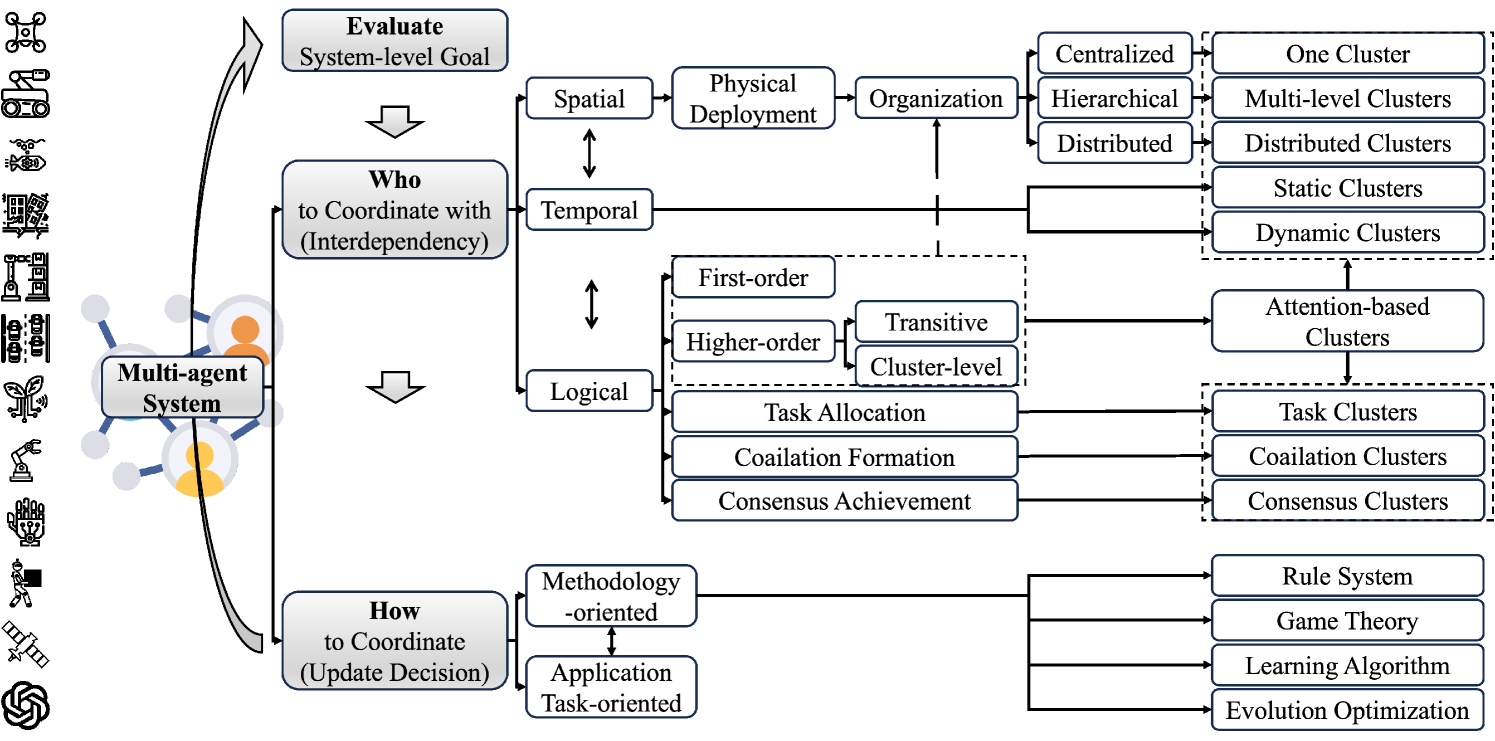
The Unified Framework for Multi-Agent Coordination proposed by the authors
Breakthrough Assessment
4/10
A comprehensive survey that provides a useful unification taxonomy for the field. While it organizes existing knowledge rather than introducing a new algorithm, the 'Who/How' framework offers clarity for cross-domain research.