📝 Paper Summary
Time Series Anomaly Detection (TSAD)
Robotic Manipulation
AnoF-Diff uses a diffusion model to reconstruct force-torque signals conditioned on robot states, enabling real-time anomaly detection in forceful manipulation via a parallel one-step denoising strategy.
Core Problem
Robotic forceful tool-use data is noisy, non-stationary, and high-dimensional, making it difficult for standard anomaly detectors to distinguish true failures from normal variations.
Why it matters:
- Safety and reliability in robotic systems depend on detecting unexpected events during forceful tasks like prying or tightening
- Existing methods often fail to capture cross-dimensional dependencies (e.g., how force depends on pose) in complex sensor data
- Iterative diffusion denoising is typically too slow for real-time online monitoring required in dynamic robot control
Concrete Example:
In a socket mating task, a robot might fail to align the wrench with a nut. The resulting high forces look similar to successful tightening, causing standard detectors to miss the anomaly or trigger false alarms due to noise.
Key Novelty
Conditional Force-Torque Diffusion with Parallel One-Step Evaluation
- Models the conditional distribution of force-torque signals given the robot's kinematic state, rather than treating all sensor channels uniformly
- Replaces the slow, iterative reverse diffusion process with a 'parallel one-step' evaluation that estimates anomalies instantly by averaging errors from multiple noise levels simultaneously
Architecture
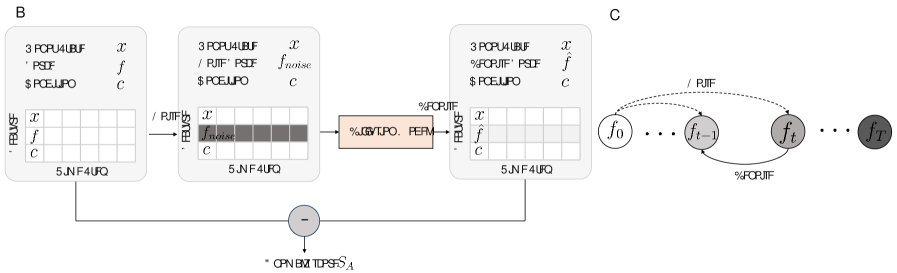
The training and inference architecture of AnoF-Diff. (a) Training: Conditional masking diffuses only force-torque data while keeping state data as condition. (b) Parallel Anomaly Score Evaluation: One-step denoising is applied at multiple timesteps simultaneously to compute the score.
Evaluation Highlights
- Outperforms state-of-the-art Anomaly Transformer and ImDiffusion on F1-score and AUROC across four real-world robotic tasks
- Achieves superior robustness to noise compared to reconstruction-based baselines (LSTM-AE, VAEs)
- Enables real-time online detection frequencies suitable for control loops by avoiding full iterative denoising
Breakthrough Assessment
7/10
Solid application of diffusion to a specific robotics problem with a clever inference speed-up (parallel one-step). Strong empirical results on real hardware, though the core diffusion architecture is standard.