📝 Paper Summary
Robotic Manipulation
Reinforcement Learning for Control
Sim-to-Real Transfer
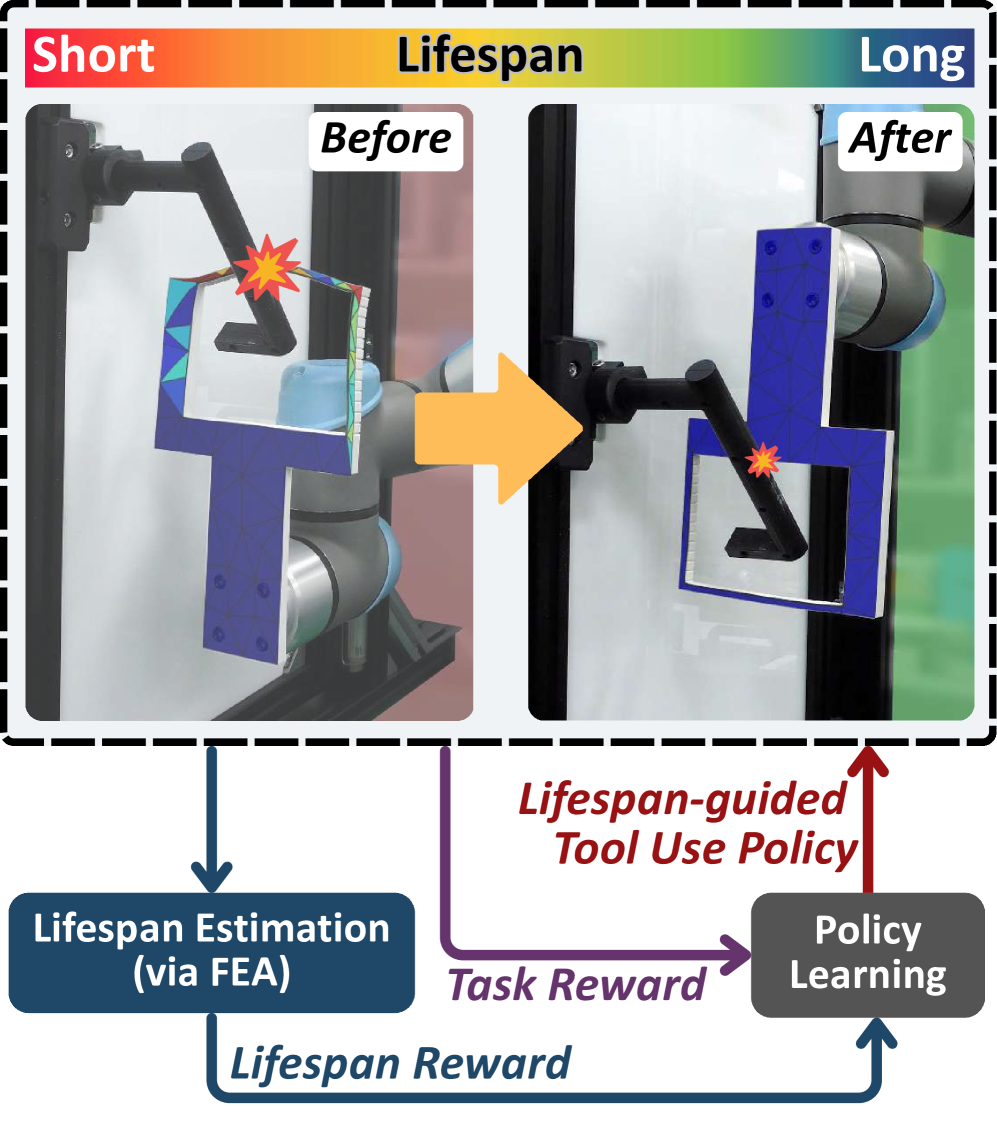
A reinforcement learning framework that integrates Finite Element Analysis damage estimation into the reward loop to teach robots how to use tools effectively while minimizing structural wear.
Core Problem
General-purpose tools used by robots in inaccessible environments (e.g., space, mining) lack predefined usage strategies, leading to non-optimal usage that accelerates wear and failure.
Why it matters:
- Replacing damaged tools in remote environments (lunar surfaces, ruins) is costly and time-consuming, severely impacting operational efficiency
- Standard RL for tool use focuses on task success or stability but ignores material fatigue, leading to policies that may complete tasks but destroy the tool quickly
- The 'chicken-and-egg' problem in reward design: tool lifespan (Remaining Useful Life) can only be estimated after the full stress history of a task is known, making immediate feedback difficult
Concrete Example:
In a door-opening task, a standard policy might force the handle with excessive torque or poor leverage, completing the task but causing high stress concentration. The proposed method adjusts the grasp or motion to distribute stress, preventing premature tool fracture.
Key Novelty
Lifespan-Guided Reinforcement Learning with Adaptive Reward Normalization
- Integrates Finite Element Analysis (FEA) and Miner's Rule into the RL training loop to estimate tool damage (Remaining Useful Life) from simulated stress histories
- Treats tool lifespan as a distinct reward component alongside task completion, incentivizing 'gentler' but effective manipulation strategies
- Uses Adaptive Reward Normalization (ARN) to dynamically scale rewards based on observed lifespan history, solving the issue where maximum possible lifespan is unknown beforehand
Architecture
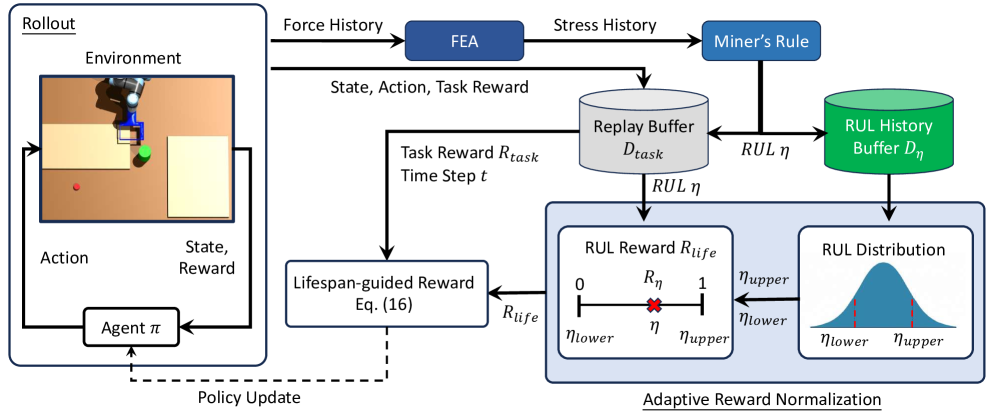
The proposed Lifespan-guided RL framework diagram.
Evaluation Highlights
- Achieved up to 12.54× lifespan extension in simulated object-moving tasks compared to task-only baselines
- Demonstrated up to 8.01× lifespan extension in simulation for door-opening tasks with general-purpose tools
- Successful sim-to-real transfer validated by physically executing tasks until tool failure, confirming lifespan gains on real hardware
Breakthrough Assessment
7/10
Novel integration of mechanical engineering concepts (FEA/Miner's Rule) into RL for robotics. Strong real-world validation (testing to failure). Specific to tool-use but highly relevant for autonomous maintenance.