📝 Paper Summary
Multi-Robot Systems (MRS)
Embodied AI
Human-Robot Interaction
This survey systematically categorizes how Large Language Models (LLMs) are integrated into Multi-Robot Systems (MRS) across high-level task allocation, mid-level planning, and low-level action execution.
Core Problem
Traditional Multi-Robot Systems (MRS) struggle with natural language communication, adaptive coordination in dynamic environments, and intuitive human-robot interaction due to rigid, predefined protocols.
Why it matters:
- MRS scale and complexity often exceed single-robot capabilities, requiring robust coordination which traditional rigid protocols stifle
- Operators lacking technical expertise need natural language interfaces to command robot swarms effectively
- Prior surveys focus on single-robot systems or virtual multi-agent systems, missing the physical constraints and specific coordination challenges of real-world embodied MRS
Concrete Example:
In a search and rescue mission, a traditional MRS requires specific coded commands to reallocate tasks. With LLMs, an operator can simply say 'Robot A, help Robot B move the debris,' and the system autonomously re-plans and executes the coordination.
Key Novelty
Comprehensive Taxonomy of LLM-MRS Integration
- Establishes a three-level hierarchy for LLM usage in MRS: high-level task allocation, mid-level motion planning, and low-level action execution
- Analyzes distinct communication architectures (Centralized, Decentralized, Hybrid) specifically for LLM-driven robot teams
- Bridges the gap between virtual multi-agent system literature and physically embodied multi-robot research
Architecture
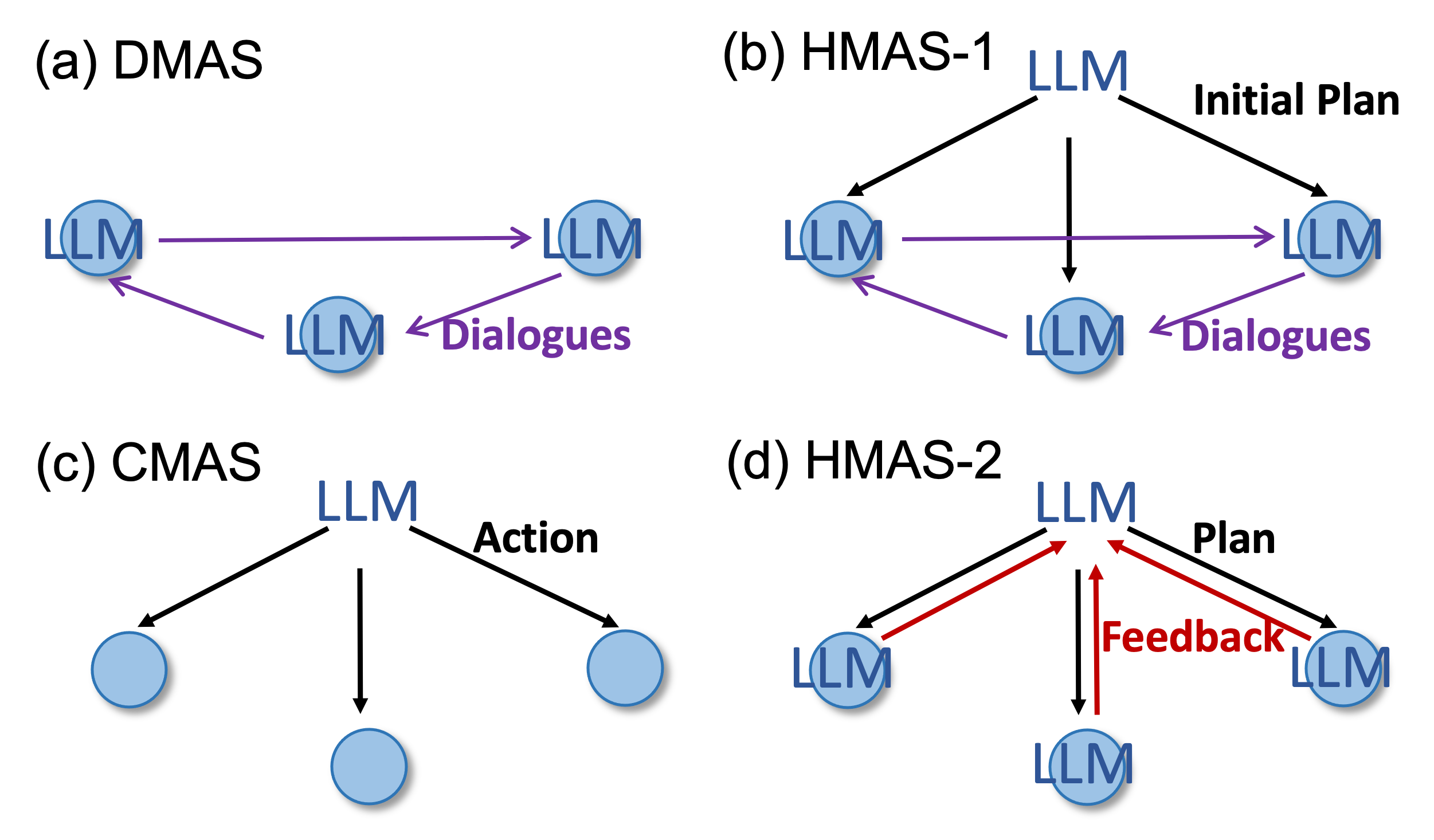
Comparison of four communication architectures for LLM-based Multi-Agent Systems: Centralized (CMAS), Decentralized (DMAS), and two Hybrid variants (HMAS-1, HMAS-2)
Evaluation Highlights
- Reviews four distinct communication architectures (Centralized, Decentralized, HMAS-1, HMAS-2) for LLM-based MRS
- Identifies Hybrid Multi-Agent Systems (HMAS-2) as superior to fully centralized or decentralized approaches for complex tasks involving >6 agents
- Categorizes applications across 5 domains: household robotics, construction, formation control, target tracking, and robot games
Breakthrough Assessment
7/10
A timely and necessary survey that defines the taxonomy for a rapidly emerging field. While it doesn't propose a new model, it structures the research landscape for future work.