📊 Experiments & Results
Evaluation Setup
Pairwise preference prediction across physical and general domains
Benchmarks:
- PhyCritic-Bench (Physical AI Reasoning & Planning (Robotics + Autonomous Driving)) [New]
- Cosmos-Reason1 (Val) (Physical Common Sense & Causal Reasoning)
- VL-RewardBench (General Multimodal Reward Modeling)
- Multimodal RewardBench (General Multimodal Reward Modeling)
Metrics:
- Accuracy (Preference Prediction)
- Accuracy (as Policy Model)
- Statistical methodology: Not explicitly reported in the paper
Key Results
| Benchmark | Metric | Baseline | This Paper | Δ |
|---|---|---|---|---|
| PhyCritic achieves superior performance on the newly proposed physical AI benchmark compared to open-source baselines. | ||||
| PhyCritic-Bench | Accuracy | 73.3 | 81.9 | +8.6 |
| PhyCritic-Bench | Accuracy | 73.6 | 81.9 | +8.3 |
| The model also generalizes well to general-purpose multimodal reward benchmarks. | ||||
| VL-RewardBench | Overall Accuracy | 76.4 | 86.4 | +10.0 |
| When used as a policy model (answering questions directly), PhyCritic improves over its base model. | ||||
| Cosmos-Reason1 (Val) | Accuracy | 57.3 | 61.4 | +4.1 |
Experiment Figures
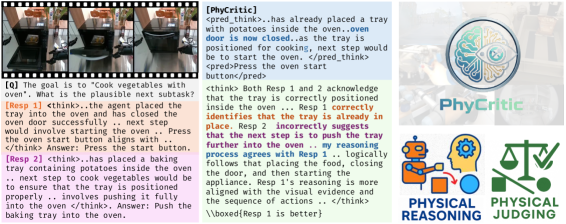
Conceptual comparison between Standard Critic and PhyCritic (Self-Referential).
Main Takeaways
- Self-referential training significantly boosts critic accuracy by grounding judgments in internal reasoning.
- Physical domain training transfers positively to general multimodal reward tasks, suggesting physical reasoning is a core capability.
- The two-stage pipeline (Skill Warmup + Critic Finetuning) effectively transforms a standard VLM into a specialized physical critic.
- PhyCritic outperforms much larger or more specialized baselines (like InternVL2.5-MPO) on physical benchmarks despite being 7B parameters.