📝 Paper Summary
Humanoid Locomotion
Sim-to-Real Transfer
Reinforcement Learning for Robotics
Humanoid-Gym is an open-source reinforcement learning framework that enables humanoid robots to learn locomotion skills in simulation and transfer them to the real world zero-shot using specialized rewards and a sim-to-sim validation tool.
Core Problem
The complex structure of humanoid robots creates a larger sim-to-real gap compared to quadrupeds, making it difficult to transfer locomotion policies trained in simulation directly to physical hardware.
Why it matters:
- Humanoid robots are uniquely suited for human-centric environments but are harder to control than other robot types due to stability and complexity issues.
- Existing open-source resources for humanoid locomotion are lacking compared to quadrupeds, hindering research progress in this area.
- Testing policies directly on expensive humanoid hardware is risky; robust simulation verification is needed before real-world deployment.
Concrete Example:
A policy trained in a standard simulator (Isaac Gym) might exploit physics inaccuracies, causing a real humanoid robot to fall immediately upon deployment. Humanoid-Gym mitigates this by validating the policy in a second, higher-fidelity simulator (MuJoCo) before real-world attempts.
Key Novelty
Sim-to-Sim-to-Real Verification Pipeline
- Introduces a rigorous validation step where policies trained in high-speed Isaac Gym are tested in high-fidelity MuJoCo simulations before real-world deployment.
- Utilizes a specialized reward function designed for humanoids, focusing on velocity tracking, gait stability, and smooth foot contact patterns.
- employs meticulous domain randomization to robustify the policy against physical uncertainties.
Architecture
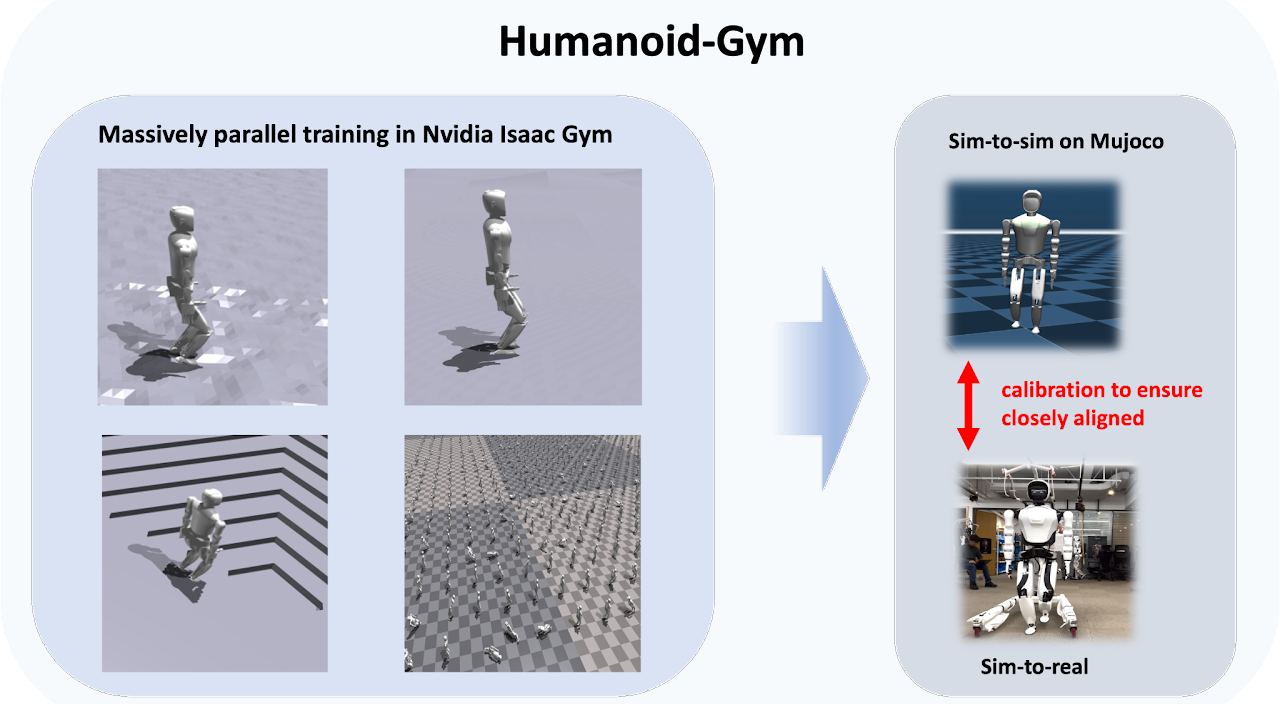
The Humanoid-Gym workflow, illustrating the training process in Isaac Gym, validation in MuJoCo, and deployment to the real robot.
Evaluation Highlights
- Achieved successful zero-shot transfer to two real-world humanoid robots: RobotEra’s XBot-S (1.2m) and XBot-L (1.65m).
- Demonstrated robust locomotion on both flat and uneven terrains in the real world using the same trained policy.
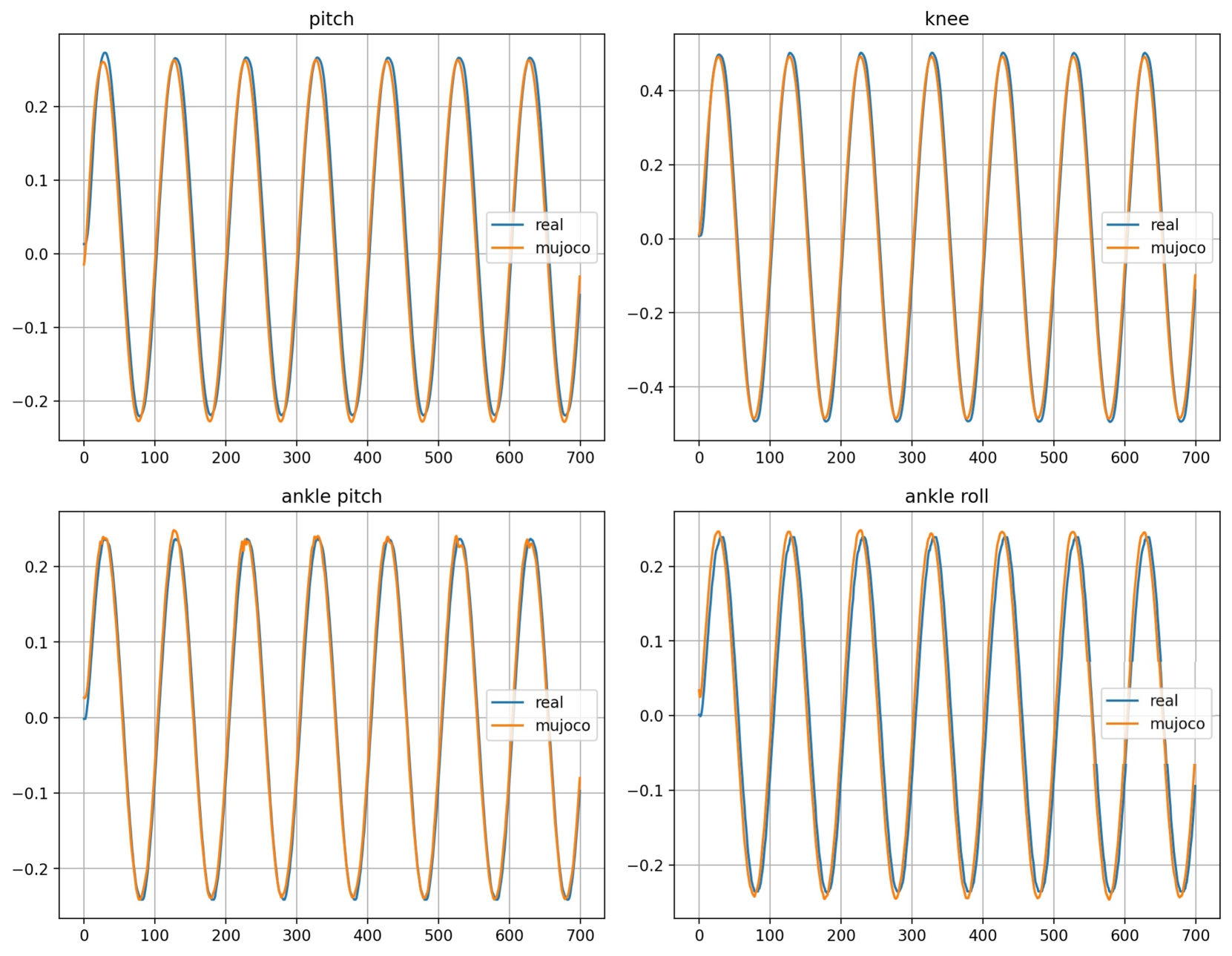
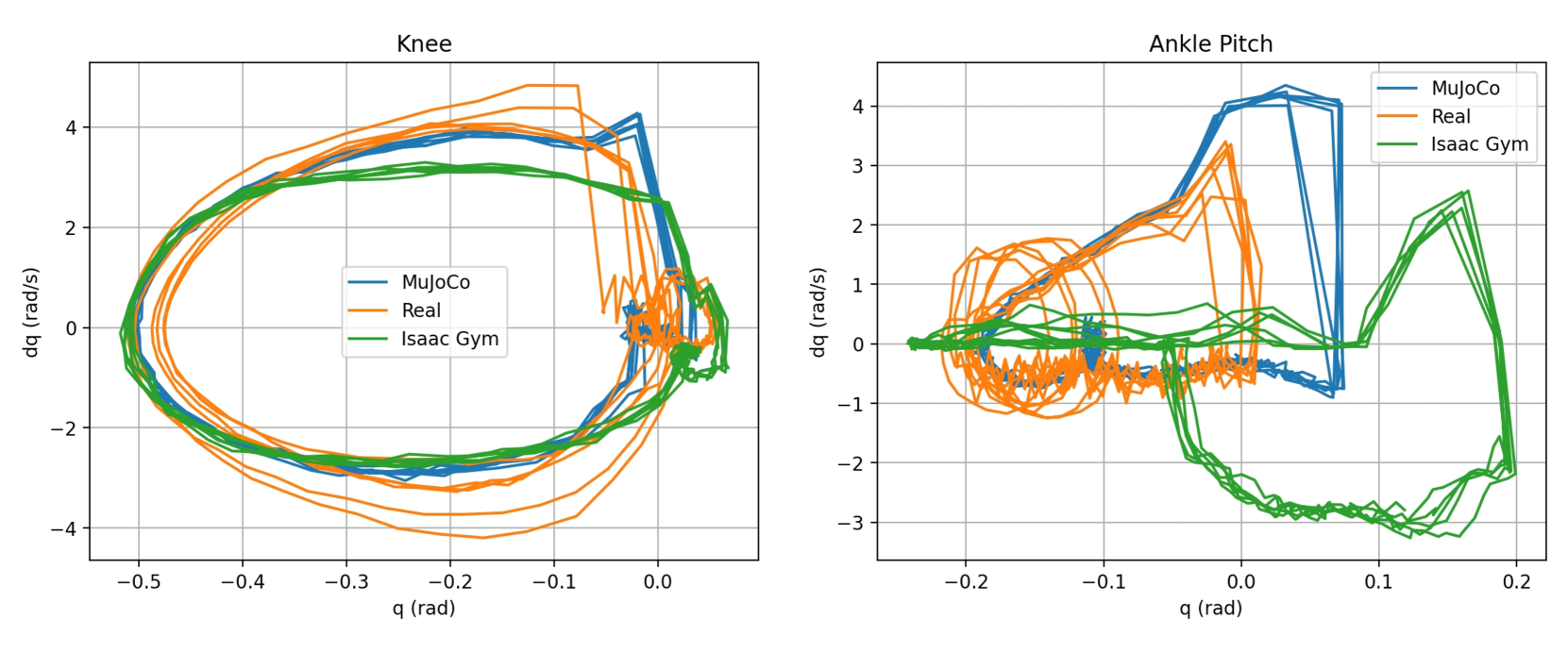
- Calibrated MuJoCo simulation showed nearly identical joint trajectories to real-world data, validating the sim-to-sim framework's effectiveness.
Breakthrough Assessment
7/10
Significant contribution as a comprehensive open-source framework for humanoid RL, addressing the scarcity of such tools. The dual-simulation validation approach is practical and effective for bridging the sim-to-real gap.