📝 Paper Summary
Legged Locomotion
Sim-to-Real Transfer
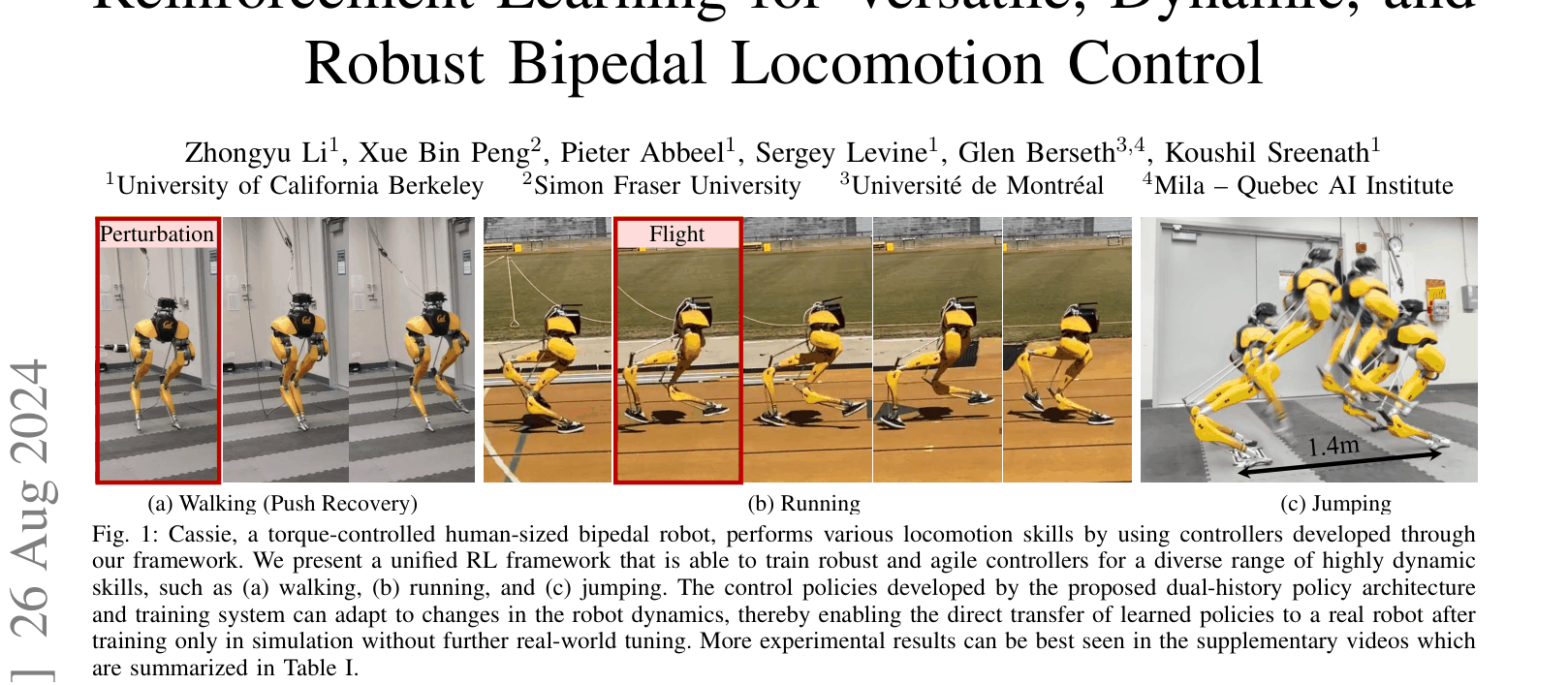
A reinforcement learning framework using a dual-history architecture—combining short-term feedback with long-term input/output logs—enables a bipedal robot to perform agile walking, running, and jumping with zero-shot sim-to-real transfer.
Core Problem
Controlling bipedal robots is difficult due to their high-dimensional, nonlinear, and underactuated dynamics, where distinct skills (like walking vs. jumping) typically require specialized, handcrafted contact plans.
Why it matters:
- Traditional model-based optimal control is computationally expensive and struggles with real-time whole-body planning for diverse agile skills
- Prior RL methods often focus on single skills (e.g., just walking) or fail to transfer highly dynamic aperiodic motions (like jumping) to the real world without fine-tuning
Concrete Example:
Running introduces a flight phase where the robot is underactuated and unstable; standard walking controllers that rely on orbital stability fail here, and model-based methods often cannot re-plan contact sequences fast enough for real-world disturbances.
Key Novelty
Dual-History Policy Architecture with Multi-Stage Training
- Incorporates two history streams: a 'short' history (4 steps) for immediate feedback control and a 'long' history (66 steps/2 seconds) processed via a CNN to implicitly identify system dynamics
- Utilizes a training curriculum that moves from single-task learning to 'task randomization' (varying goals) and finally 'dynamics randomization', fostering robustness and disturbance compliance
Architecture
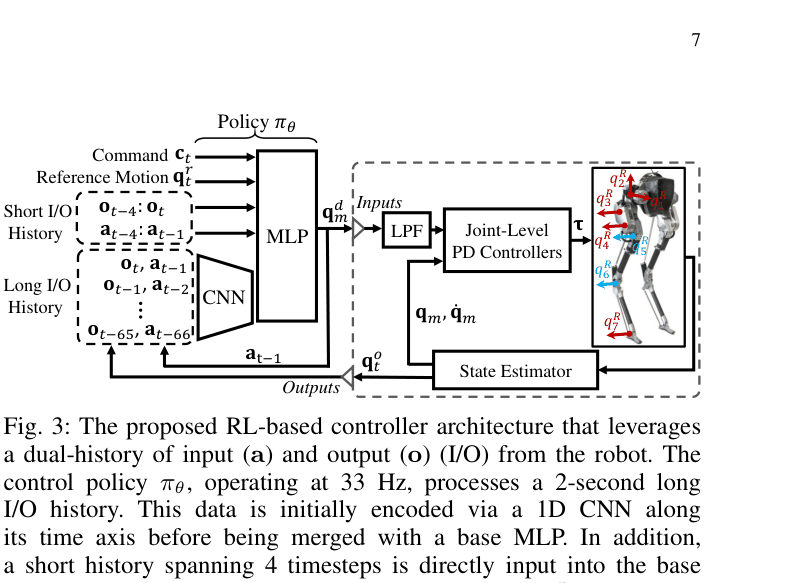
The control policy architecture showing the dual-history processing streams.
Evaluation Highlights
- Running: Achieved a 400-meter dash in 2 minutes 34 seconds on the Cassie robot (approx 2.6 m/s), outperforming prior RL methods that could not sustain turning or long-distance running
- Jumping: Demonstrated a standing long jump of 1.4m and a vertical box jump of 0.44m, significantly exceeding prior controller capabilities (e.g., 0.41m max leap)
- Robustness: Zero-shot transfer to real hardware with the ability to recover from unexpected external forces and adapt to hardware changes over a one-year timespan
Breakthrough Assessment
9/10
Demonstrates unprecedented versatility on a bipedal platform, unifying walking, running, and jumping in one framework with successful zero-shot transfer and impressive physical benchmarks (400m dash).