📝 Paper Summary
3D Object Detection
Model Compression
Edge Computing
LiDAR-PTQ enables 8-bit quantization of 3D detectors with near-zero accuracy loss by replacing entropy calibration with sparsity-aware max-min initialization and refining parameters using task-specific pseudo-label supervision.
Core Problem
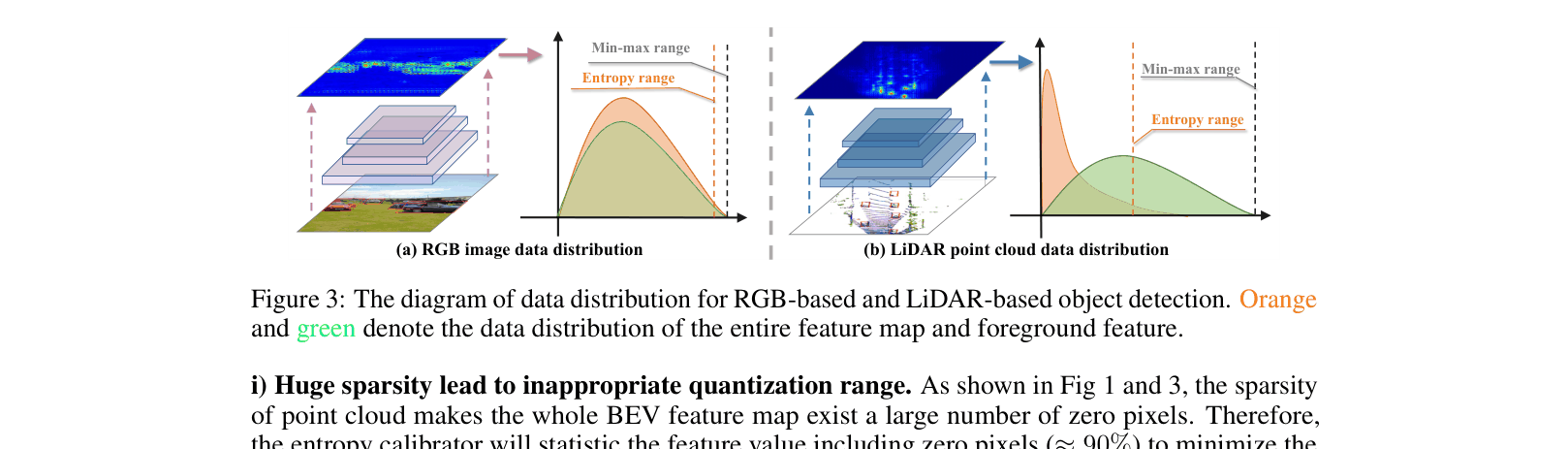
Directly applying 2D quantization methods (like entropy calibration) to 3D LiDAR models causes catastrophic performance drops due to the extreme sparsity and large coordinate ranges of point clouds.
Why it matters:
- LiDAR-based 3D detectors are computationally expensive, making deployment on resource-constrained edge devices (e.g., autonomous vehicles, robots) difficult.
- Existing 2D PTQ (Post-Training Quantization) methods assume dense activation distributions, failing to preserve geometric information in sparse 3D data.
- Retraining-based methods (QAT) are computationally expensive (taking ~94 GPU hours) and require full labeled datasets, which may be restricted for privacy.
Concrete Example:
When using standard entropy calibration on CenterPoint-Pillar, the model truncates activation values to remove 'outliers.' In point clouds, these 'outliers' represent distant points (50m+ range) carrying vital geometric info. This causes a massive accuracy drop from 60.32 mAPH to 21.65 mAPH.
Key Novelty
Sparsity-Aware Calibration & Task-Guided Supervision
- Replaces entropy calibration with a 'Sparsity-based calibration' (Max-min with grid search) to ensure the quantization range covers the full dynamic range of sparse point cloud coordinates.
- Introduces Task-guided Global Positive Loss (TGPL), which uses the full-precision model's top predictions as pseudo-labels to supervise the quantized model's output, aligning the final detection task rather than just layer-wise errors.
- Adopts an adaptive rounding mechanism that learns a rounding value per weight to minimize local reconstruction error.
Architecture
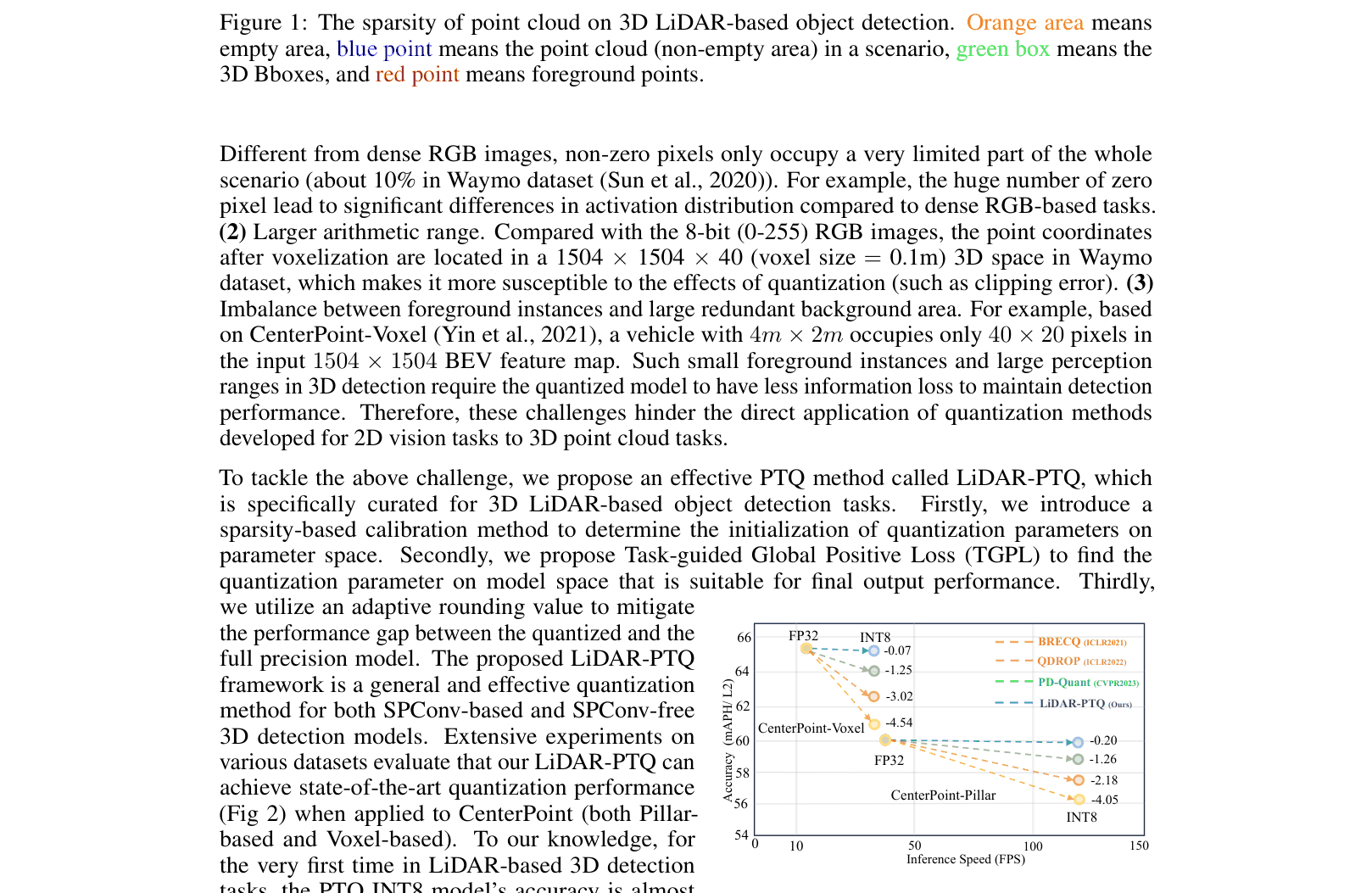
Illustration of point cloud sparsity and the impact on feature maps.
Evaluation Highlights
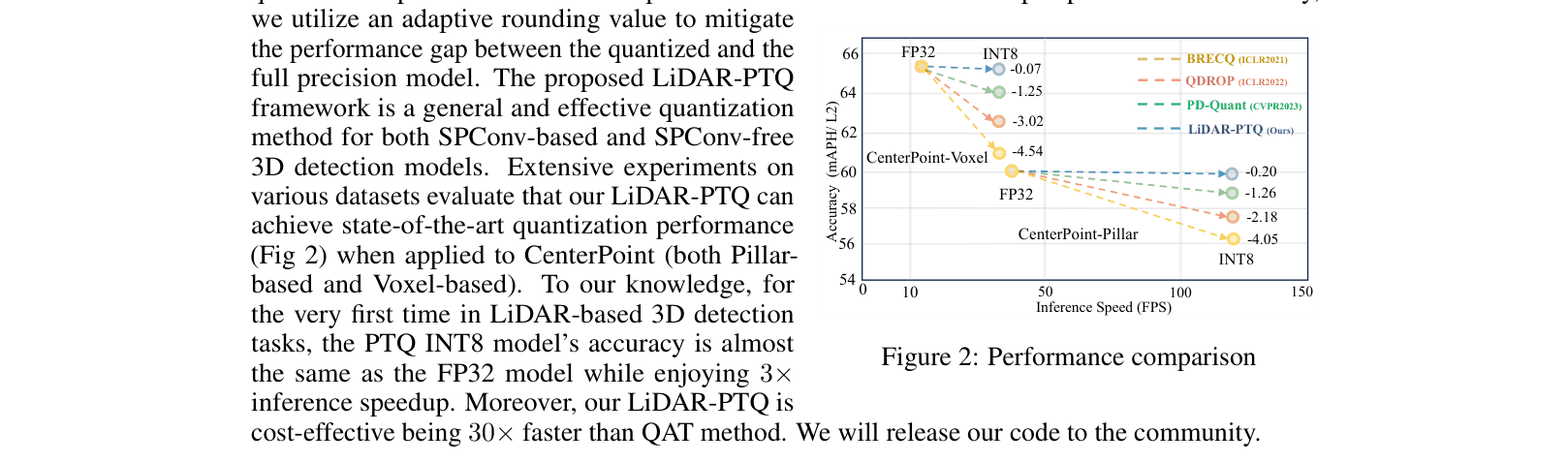
- Achieves 60.12 mAPH (Level 2) on CenterPoint-Pillar (INT8) on Waymo, matching the FP32 baseline (60.32 mAPH) with negligible loss (-0.20).
- Outperforms state-of-the-art 2D PTQ methods like BRECQ and QDrop by large margins (+3.87 and +2.00 mAPH respectively on CenterPoint-Pillar).
- Delivers 3x inference speedup on NVIDIA Jetson AGX Orin compared to FP32, while being 30x faster to calibrate than Quantization-Aware Training (QAT).
Breakthrough Assessment
9/10
Successfully solves the 'collapse' problem of PTQ in 3D LiDAR tasks where standard methods fail completely. Achieves parity with FP32 models and QAT speed/accuracy trade-offs are excellent.