📝 Paper Summary
Vision-based tactile sensing
Robotic dexterous manipulation
Minsight is a thumb-sized vision-based tactile sensor that uses a camera and deep learning to estimate distributed 3D contact forces at 60 Hz with high accuracy.
Core Problem
Existing high-resolution tactile sensors are often too bulky, fragile, or computationally slow for real-time control, while smaller sensors typically lack omnidirectional 3D force sensing capabilities.
Why it matters:
- Dexterous manipulation requires high-resolution feedback similar to human skin to handle small objects or interact safely with humans
- Bulky sensors (like the predecessor Insight) cannot fit on standard robotic grippers or anthropomorphic hands
- Slow processing pipelines (e.g., 10 Hz) introduce latency that makes closed-loop force control unstable or impossible
Concrete Example:
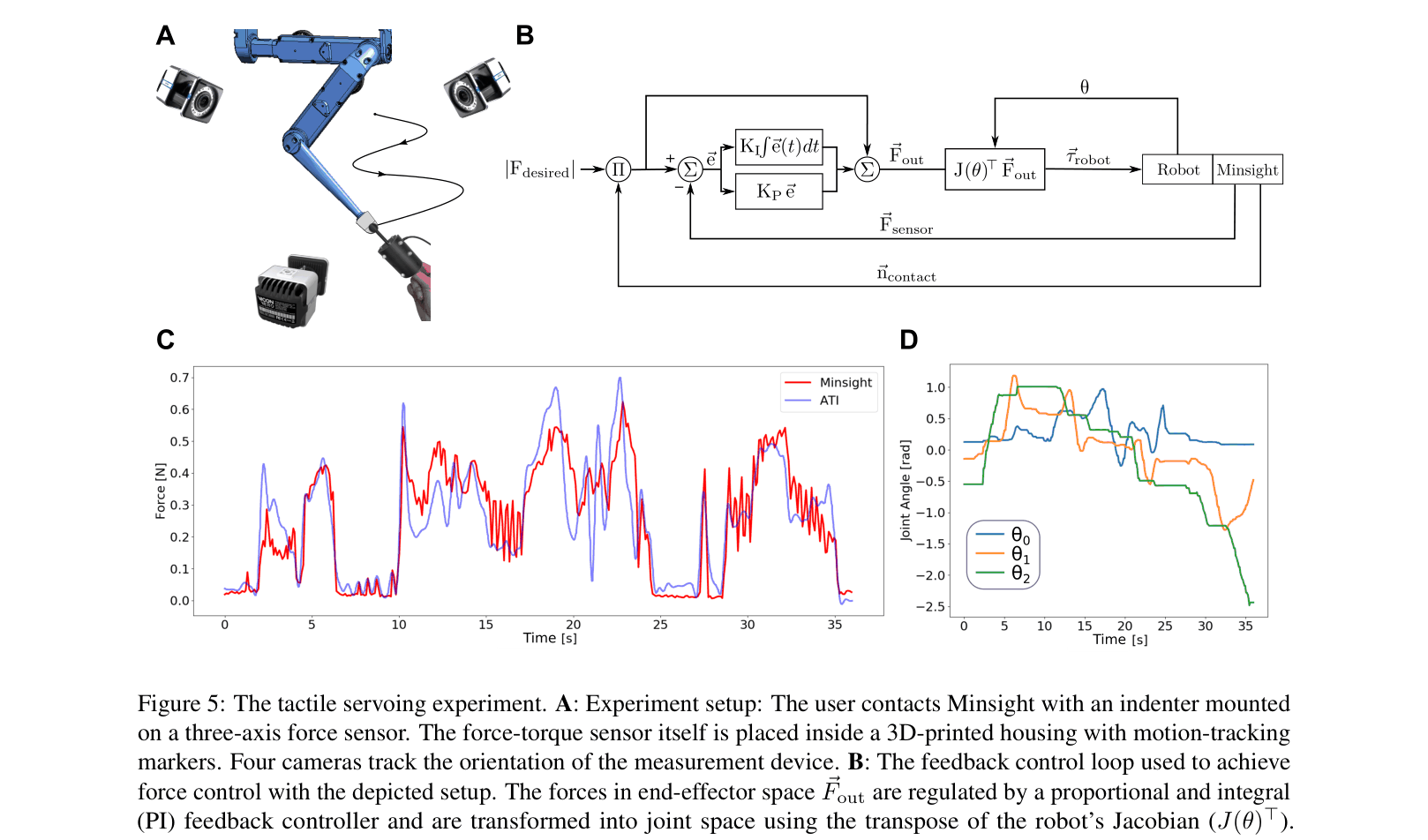
The predecessor sensor 'Insight' was 70mm tall and 40mm wide (too big for a robot hand) and ran at only 10 Hz due to a CPU bottleneck. Minsight shrinks this to 30mm x 22mm and achieves 60 Hz, enabling tasks like tracking a moving human finger.
Key Novelty
Miniaturized Camera-Based Force Inference (Minsight)
- Replaces the Raspberry Pi camera of Insight with a miniature USB camera and optimized LED collimator to fit inside a thumb-sized shell (roughly 5x volume reduction)
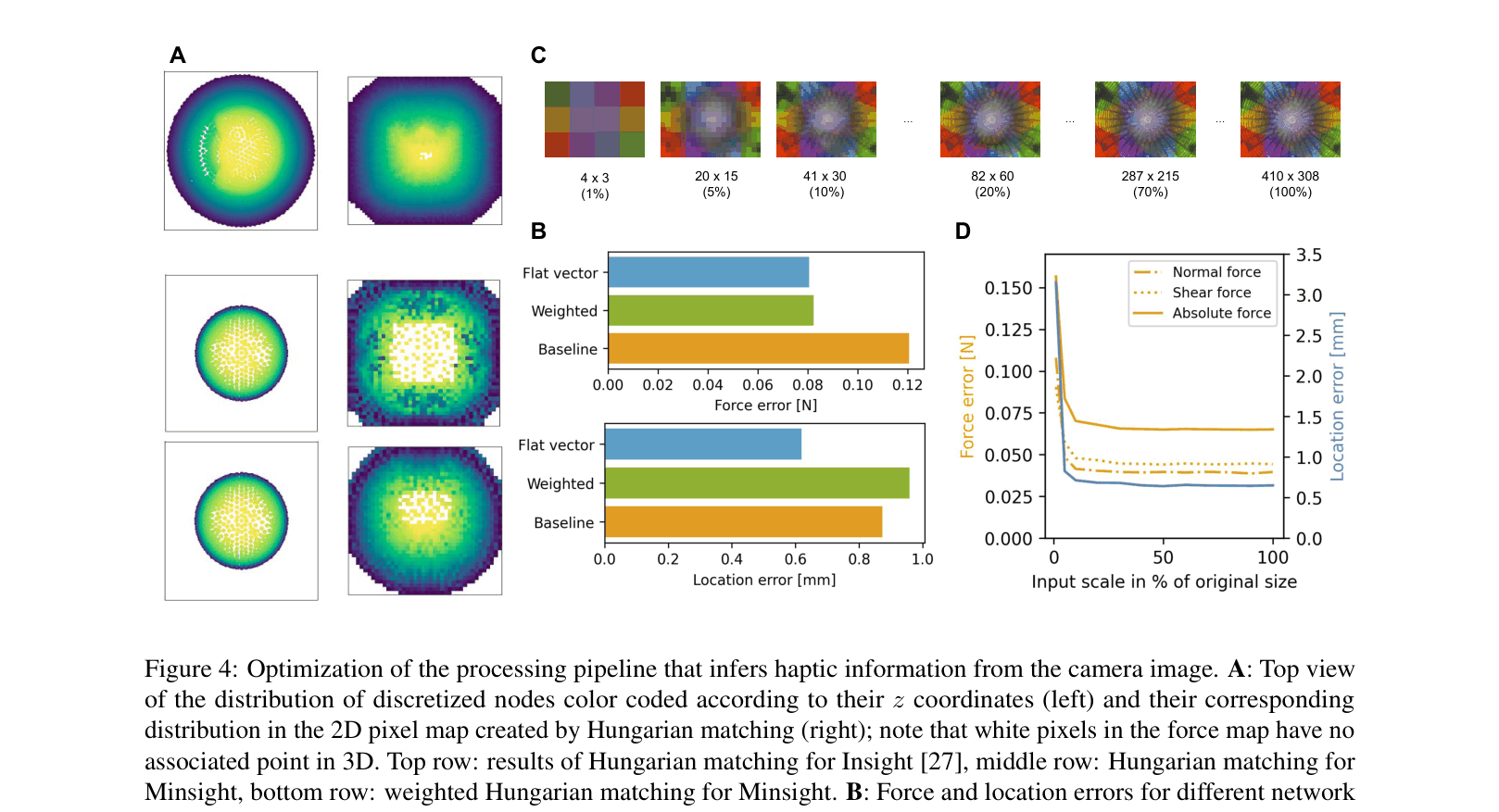
- Demonstrates that low-resolution inputs (downscaled to 82x60 pixels) retain sufficient information for accurate force estimation, enabling high-speed inference (60 Hz)
- Introduces a 'weighted Hungarian matching' method to map 3D curved surface points to 2D image pixels more smoothly than standard assignment methods
Architecture
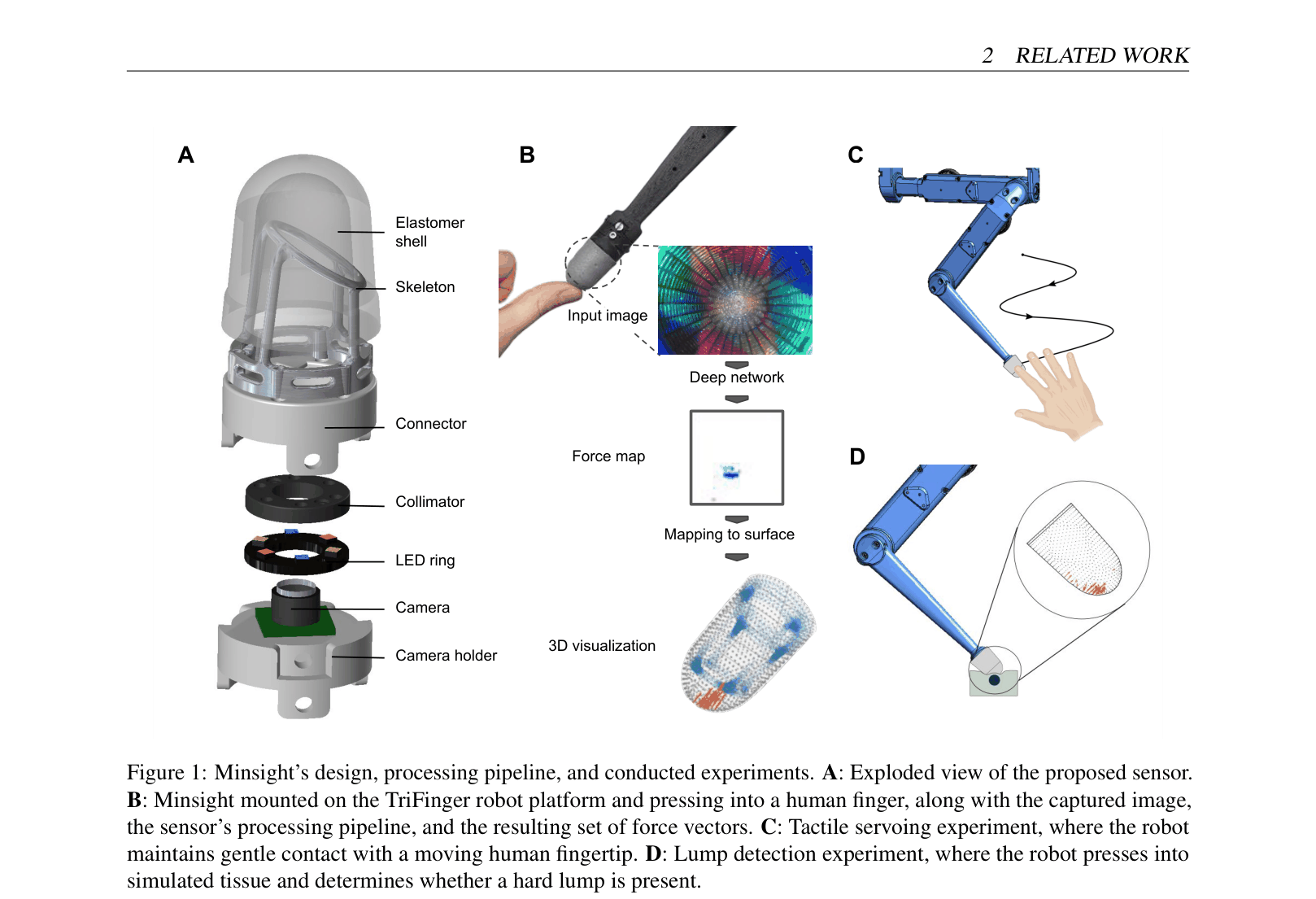
Exploded view of the sensor hardware and the data processing pipeline from image to force map.
Evaluation Highlights
- Achieves a mean absolute force estimation error of 0.07 N and contact localization error of 0.6 mm across the curved surface
- Maintains a sensing frequency of 60 Hz (6x faster than predecessor Insight), enabling real-time tactile servoing
- Detects hard lumps embedded in soft material with 98% accuracy in a binary classification task
Breakthrough Assessment
8/10
Successfully miniaturizes a promising sensing technology to a practical form factor while improving speed by 6x. The high accuracy and low cost make it highly relevant for dexterous manipulation.