📝 Paper Summary
Soft Robotics
Bio-inspired Manipulation
SpiRobs utilize a logarithmic spiral geometry to create scalable soft robots capable of versatile grasping through a bio-inspired uncurling and wrapping strategy.
Core Problem
Realizing soft manipulators with biologically comparable flexibility often requires complex case-specific designs that lack a unified geometric principle for kinematics and shape.
Why it matters:
- Current soft robots struggle to match the dexterity and dynamic range of biological appendages like elephant trunks or octopus arms.
- Existing designs often rely on trial-and-error or extensive simulation rather than a scalable geometric principle, making fabrication across scales (mm to m) difficult.
Concrete Example:
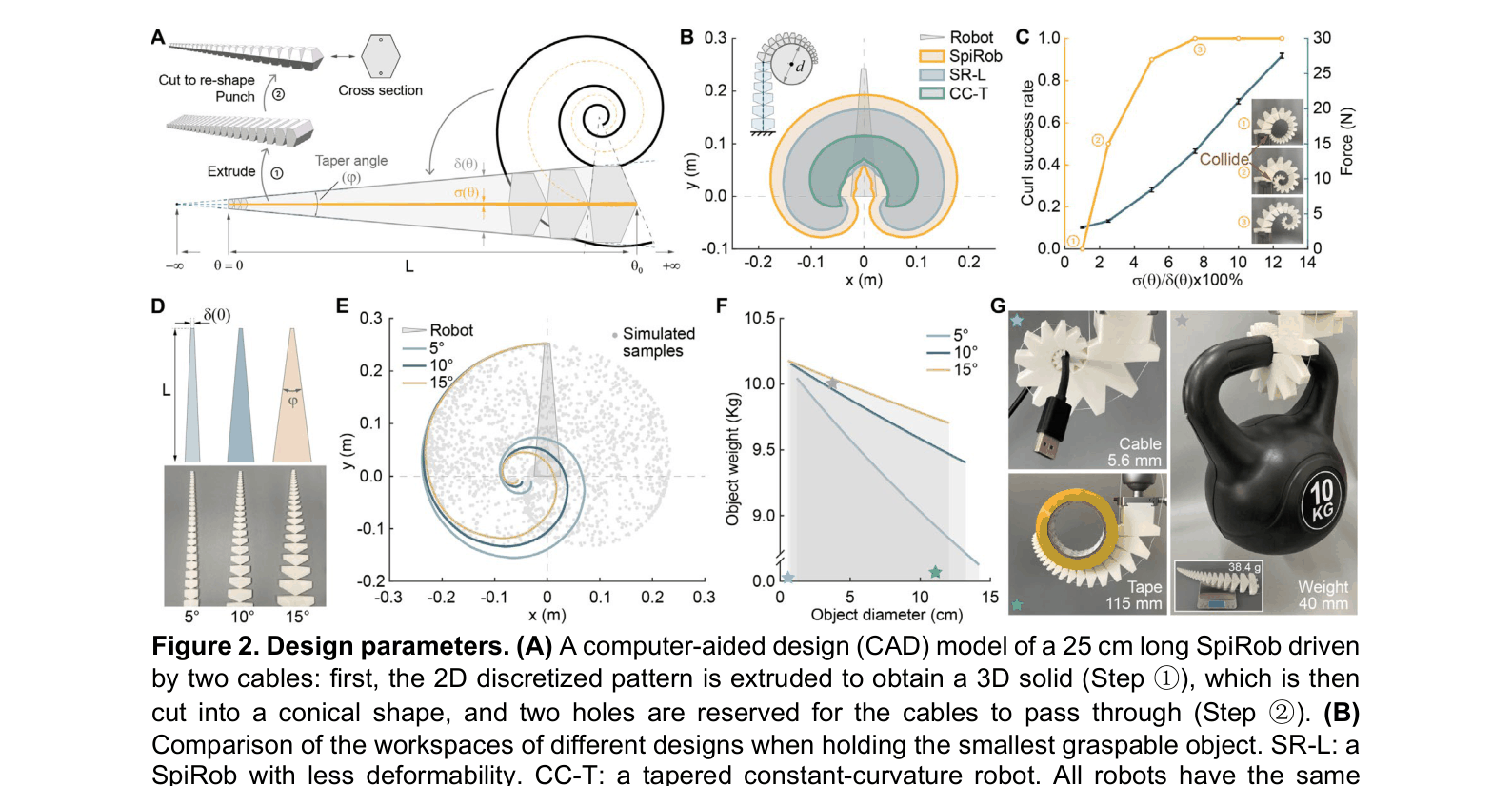
A rigid gripper or standard constant-curvature soft robot might fail to grasp objects varying drastically in size (e.g., a 5.6 mm cable vs. a 115 mm tape roll), whereas the spiral geometry adapts to both.
Key Novelty
Logarithmic Spiral-based Soft Robot (SpiRob)
- Defines robot morphology (shape/taper) and kinematics (deformation) using the mathematical properties of a logarithmic spiral, ensuring the radius of curvature decreases linearly from base to tip.
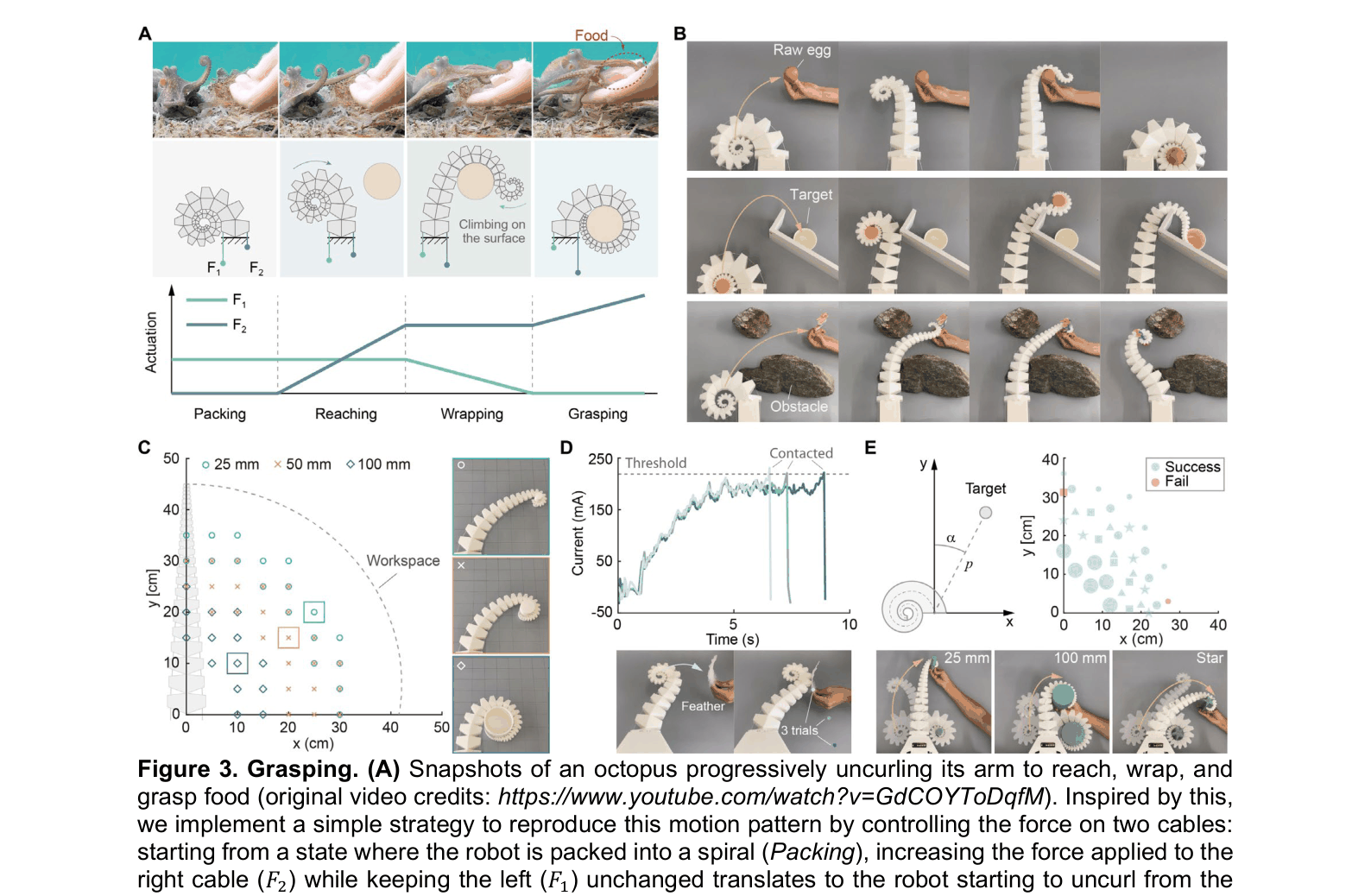
- Implements a bio-inspired 'climbing' grasping strategy where the robot uncurls along an object's surface to wrap around it, controlled simply by antagonistically tensioning cables.
Architecture
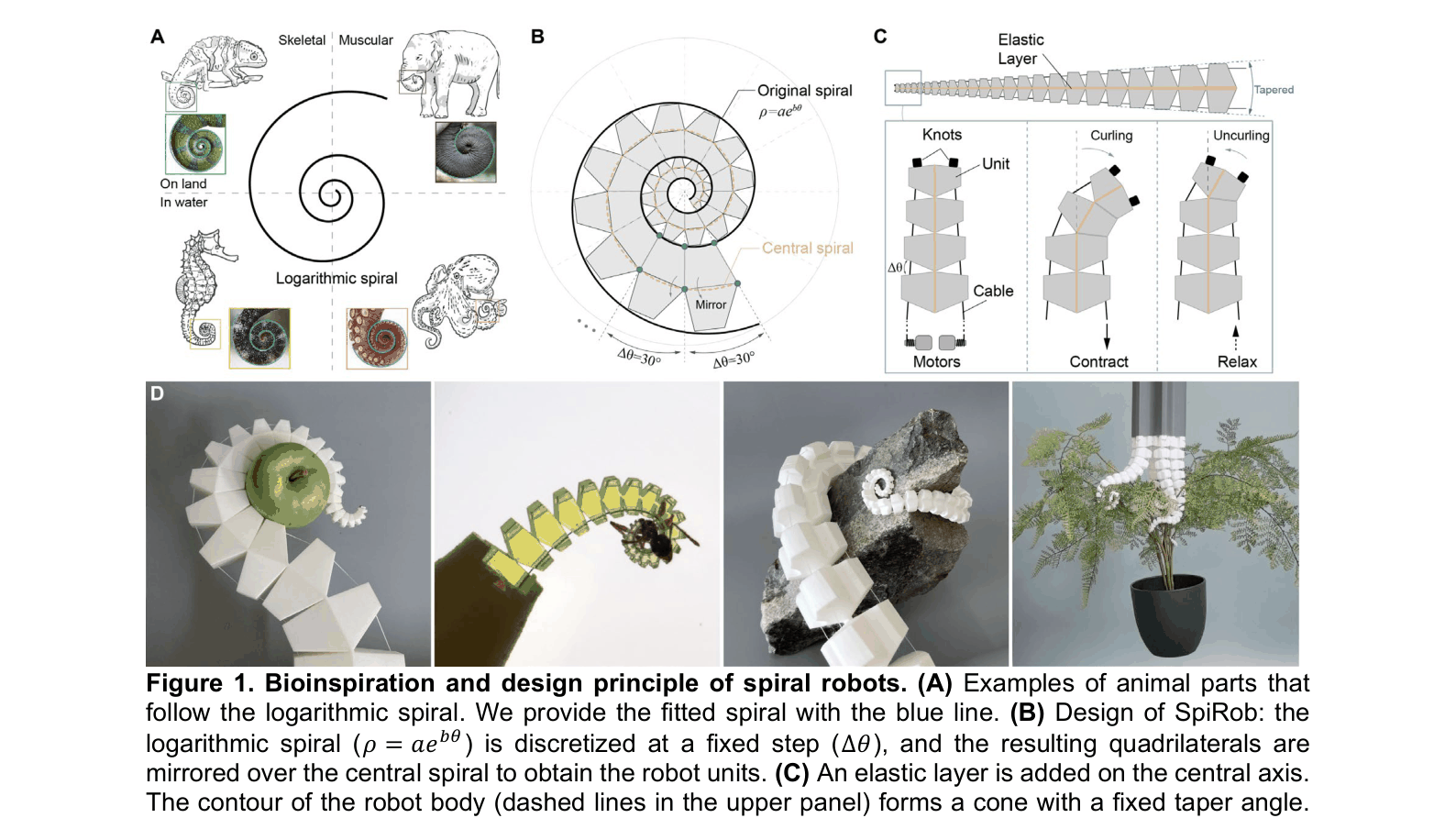
The conceptual design process: logarithmic spiral -> discretization -> mirroring to form units -> uncurling to form tapered body.
Evaluation Highlights
- Grasps objects varying in size by two orders of magnitude (5.6 mm to 115 mm diameter) with a single gripper.
- Achieves a load capacity of up to 260 times its self-weight (10 kg load vs 38.4 g weight).
- Demonstrates 94.4% success rate in automatically grasping objects of different shapes and positions using simple current-based contact detection.
Breakthrough Assessment
7/10
Strong contribution in unifying soft robot design under a specific geometric principle (logarithmic spiral) with impressive scalability and load-to-weight ratios. The control strategy is simple yet effective.