📊 Experiments & Results
Evaluation Setup
3D Object Recognition (Fine-tuning & Zero-shot) and Multimodal Instruction Following
Benchmarks:
- ScanObjectNN (3D Object Classification (Real-world))
- ModelNet40 (3D Object Classification (Synthetic))
- Objaverse-LVIS (Zero-shot 3D Recognition)
- 3D MM-Vet (Embodied Visual Question Answering & Planning) [New]
Metrics:
- Accuracy (%)
- Total Accuracy (MM-Vet)
- Statistical methodology: Not explicitly reported in the paper
Key Results
| Benchmark | Metric | Baseline | This Paper | Δ |
|---|---|---|---|---|
| Fine-tuned 3D Object Recognition results demonstrating ReCon++ encoder superiority. | ||||
| ScanObjectNN | Accuracy | 93.40 | 95.25 | +1.85 |
| ModelNet40 | Accuracy | 94.9 | 95.0 | +0.1 |
| Zero-shot recognition results showing generalization capabilities. | ||||
| Objaverse-LVIS | Top-1 Accuracy | 53.1 | 53.7 | +0.6 |
| ScanObjectNN | Top-1 Accuracy | 58.2 | 65.4 | +7.2 |
| Performance on the proposed 3D MM-Vet benchmark for embodied understanding. | ||||
| 3D MM-Vet | Total Accuracy | 44.2 | 49.3 | +5.1 |
| 3D MM-Vet | Total Accuracy | 40.6 | 42.7 | +2.1 |
Experiment Figures
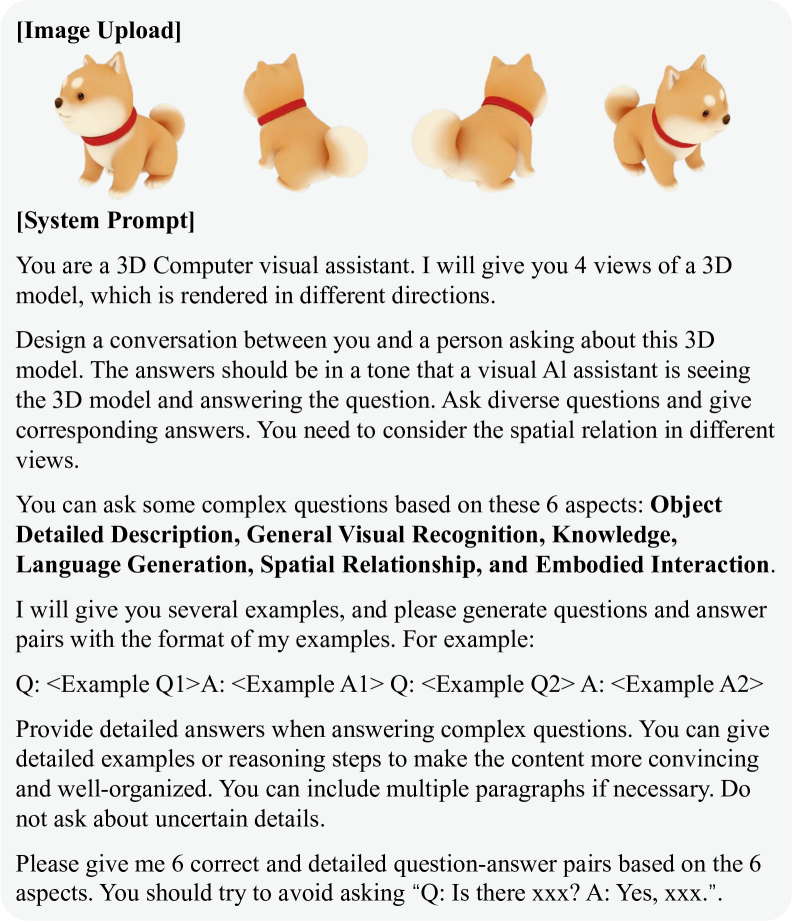
Data construction process using GPT-4V with six aspects as prompts based on multi-view images
Main Takeaways
- ReCon++ significantly advances 3D representation learning, achieving SOTA on ScanObjectNN and strong zero-shot results, proving the value of multi-view distillation.
- ShapeLLM effectively unifies general semantic understanding with embodied interaction tasks (task planning, visual grounding).
- The 'data desert' in 3D embodied AI can be effectively mitigated by synthesizing instruction-following data from rich part-annotated datasets like GAPartNet using GPT-4V.