📝 Paper Summary
Unmanned Aerial Vehicle (UAV) Surveillance
Video Analysis
MM-Tracker improves drone-based object tracking by using a Mamba-based module to efficiently model global motion and a specialized loss function to better detect fast-moving, blurred objects.
Core Problem
Drone tracking faces dual challenges: the combined motion of the drone and objects creates complex global movement patterns, while fast motion causes severe blur that makes objects hard to detect.
Why it matters:
- Standard trackers often assume simple linear motion (like Kalman Filters) or only look at local features, failing when the drone camera moves rapidly or rotates.
- Motion blur creates a long-tail distribution where fast-moving objects are rare and poorly detected, leading to frequent tracking failures in real-world aerial surveillance.
Concrete Example:
When a drone rotates quickly to follow a car, the car appears blurred and moves a large distance across the frame. Standard detectors miss the blurred car due to lack of training on such samples, and standard motion models lose track because they can't predict the large, non-linear displacement caused by the camera rotation.
Key Novelty
Motion Mamba Module & Motion Margin Loss
- Replace heavy Transformers or simple Kalman filters with a 'Motion Mamba' block that uses selective state-space scanning to capture global motion dependencies efficiently across the entire image with linear complexity.
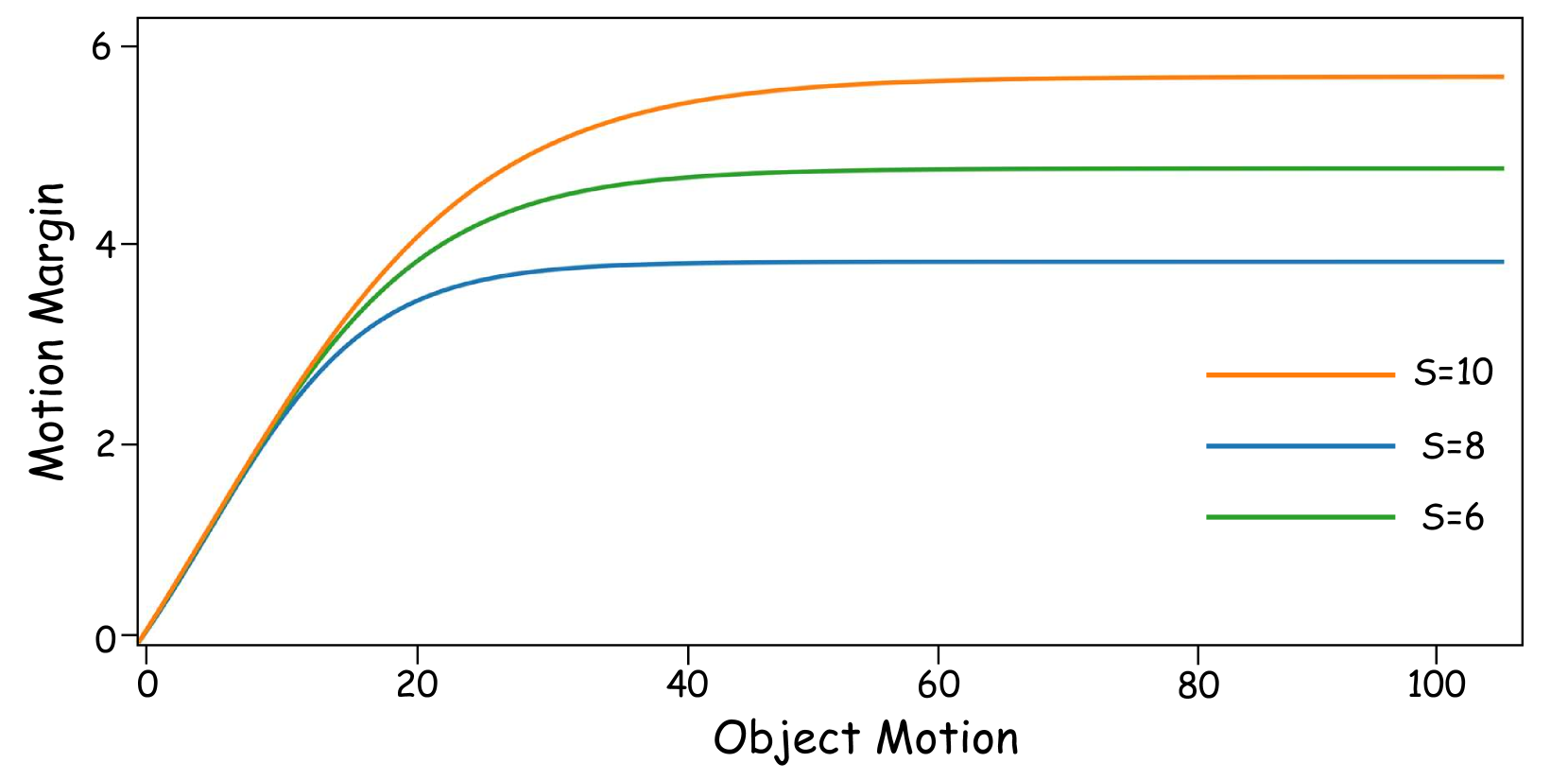
- Introduce a 'Motion Margin Loss' that dynamically forces the detector to learn harder on objects with large motion (which are usually blurred), essentially telling the model 'pay extra attention to fast things'.
Architecture
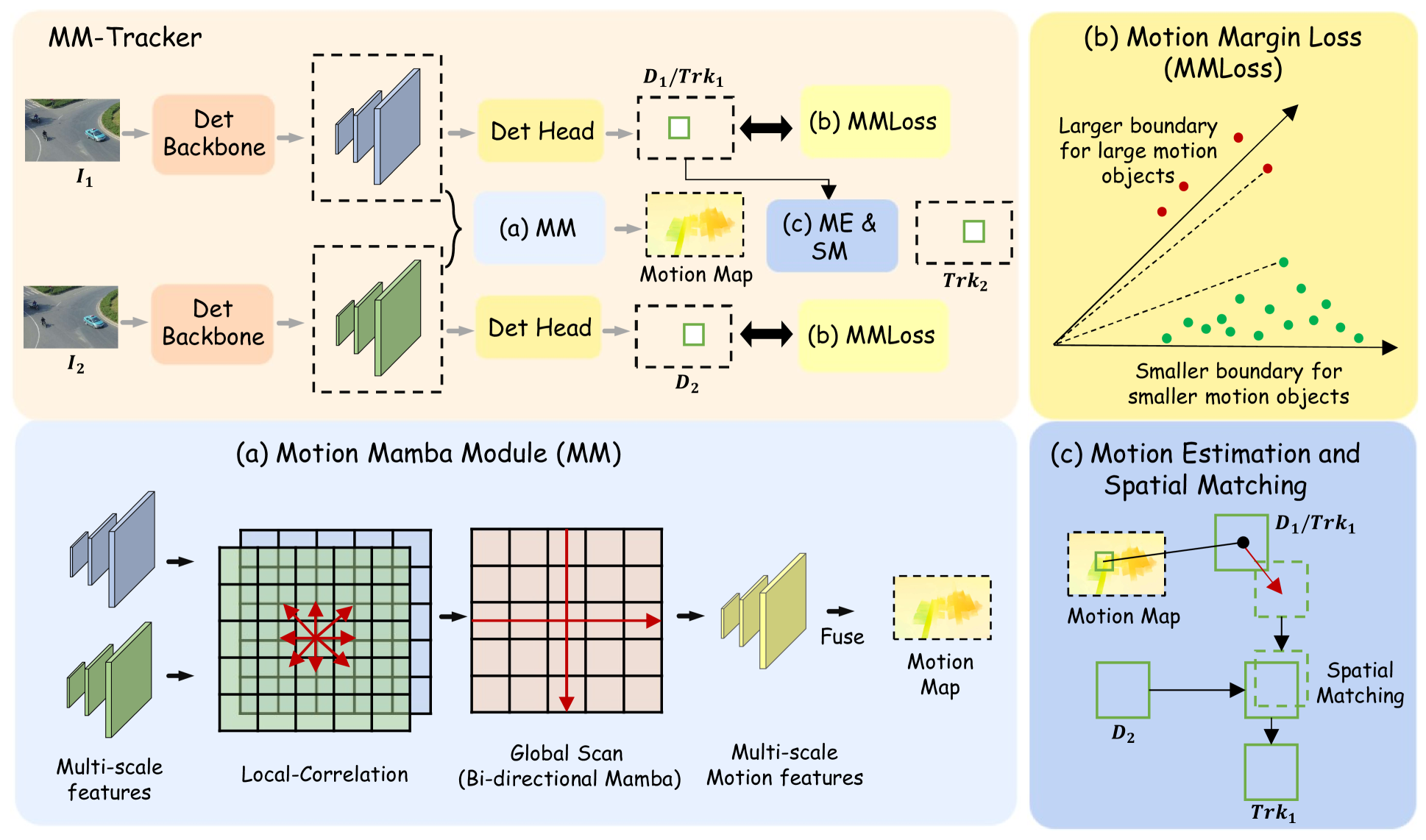
The overall MM-Tracker architecture, integrating YOLOX detection with the Motion Mamba module.
Evaluation Highlights
- Achieves State-of-the-Art performance on VisDrone and UAVDT datasets.
- +2.7% MOTA (Multiple Object Tracking Accuracy) improvement over the strong OC-SORT baseline on the VisDrone dataset.
- +3.4% MOTA improvement over the DeepSORT baseline on the UAVDT dataset.
Breakthrough Assessment
7/10
Solid engineering contribution applying Mamba to tracking and addressing a specific domain problem (motion blur in UAVs) with a novel loss function. Results are strong, though the architectural innovation is an application of existing Mamba blocks.