📝 Paper Summary
Egocentric Vision
Wearable Hardware
Multi-modal Sensing
Project Aria is a sensor-rich, glasses-like recording device paired with cloud-based machine perception services designed to capture and process egocentric, multi-modal data for always-on AI research.
Core Problem
Developing context-aware, personalized AI agents requires massive amounts of egocentric (first-person) data, but existing datasets are biased towards handheld devices and lack the comprehensive, always-on sensor suite of future AR glasses.
Why it matters:
- Current AI models (like DALL-E2 or GPT-4) excel at allocentric (third-person) tasks but struggle with egocentric reasoning because internet data is biased towards curated, handheld photos.
- To build truly helpful AR assistants, researchers need data that captures the full context of daily life (gaze, audio, location, motion) in a socially acceptable form factor.
- Raw sensor data from wearables is difficult to use without precise calibration and trajectory estimation, creating a high barrier to entry for research.
Concrete Example:
A researcher wants to train an AI to recognize when a user is playing a guitar vs. just holding it. Using a standard camera, this is ambiguous. With Project Aria, the researcher can leverage time-aligned spatial audio, eye gaze (looking at fingers vs. sheet music), and head motion to disambiguate the activity, as shown in the paper's guitar example.
Key Novelty
Hardware-Software Research Platform for Egocentric AI
- Integrates a high-spec multi-modal sensor suite (similar to future AR glasses) into a lightweight, non-display device specifically for data collection, bypassing the power constraints of driving displays.
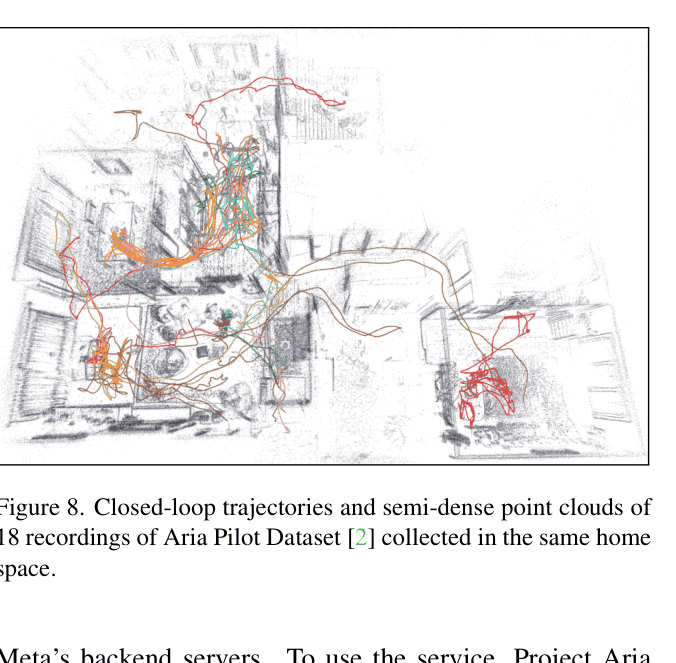
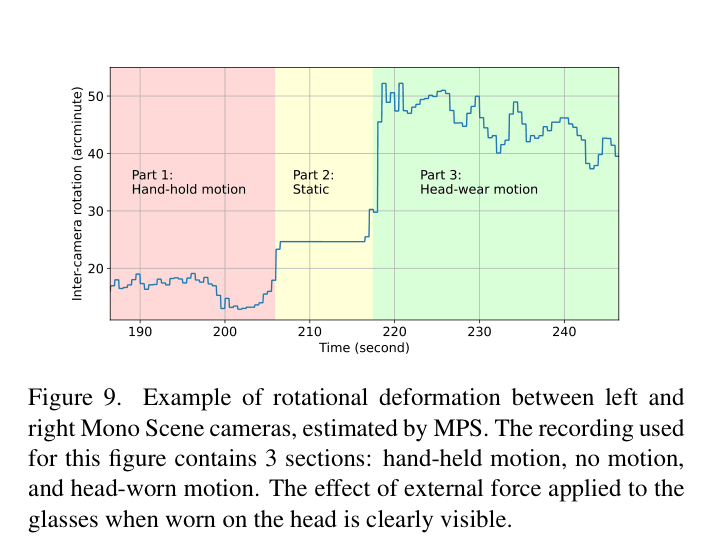
- Couples hardware with Machine Perception Services (MPS) that process raw recordings offline to provide 'ground truth' derived data (6DoF trajectories, eye gaze, point clouds) without requiring on-device compute.
Architecture
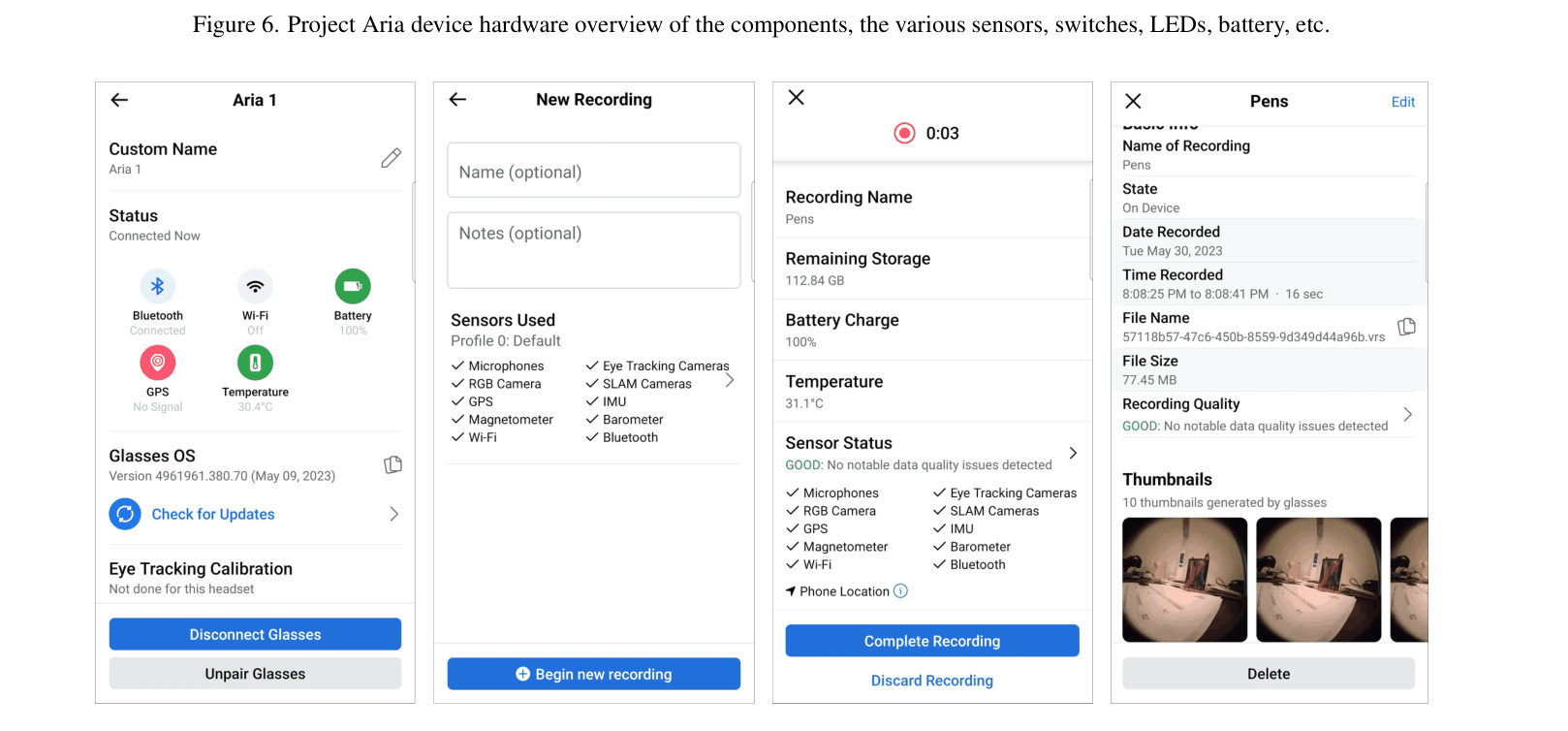
Hardware overview of the Project Aria device, detailing the location of all sensors and components on the glasses frame.
Evaluation Highlights
- Achieves open-loop trajectory drift of less than 0.4% of distance traveled using the onboard VIO (Visual Inertial Odometry) system.
- Post-processed closed-loop trajectories achieve a global RMSE translation error of no more than 1.5 cm in room-scale scenarios.
- Eye gaze tracking achieves a median gaze ray error of 1.5 degrees after applying personalized calibration.
Breakthrough Assessment
8/10
While not a new 'model architecture' in the traditional sense, this platform significantly lowers the barrier for egocentric AI research by solving difficult hardware and pre-processing problems (SLAM, calibration) at scale.