📝 Paper Summary
Synthetic Data Generation
Sim-to-Real Transfer
Robot Manipulation
GenSim2 autonomously generates diverse articulated robotic tasks and demonstrations by leveraging multi-modal and reasoning LLMs to design solvers, enabling robust sim-to-real transfer via a point-cloud policy.
Core Problem
Scaling robotic simulation is bottlenecked by the human effort required to design complex articulated tasks and valid solvers, while existing sim-to-real methods often fail to generalize across diverse tasks.
Why it matters:
- Real-world robot data collection is expensive and unscalable compared to simulation
- Manual creation of simulation assets and task logic limits the diversity needed for generalizable policies
- Existing generative simulation methods (like RoboGen) struggle with the complexity of articulated objects and precise contact-rich motions
Concrete Example:
In a task like 'opening a box,' a text-only LLM might generate code that misses the box lid's specific geometry or joint limits. GenSim2 uses a multi-modal LLM (GPT-4V) to inspect the rendered scene, identify keypoints, and generate precise motion constraints for a solver.
Key Novelty
Visual-Feedback Solver Generation & Reasoning-Enhanced Task Proposal
- Uses Multi-modal LLMs (GPT-4V) to iteratively generate and verify constraints for a keypoint-based motion planner (kPAM) by 'seeing' the simulation assets
- Leverages Reasoning LLMs (OpenAI o1) to decompose long-horizon tasks into solvable sub-tasks with higher logical consistency than vanilla LLMs
- Distills generated data into a Proprioceptive Point-cloud Transformer (PPT) policy designed specifically to bridge the sim-to-real gap using geometry
Architecture
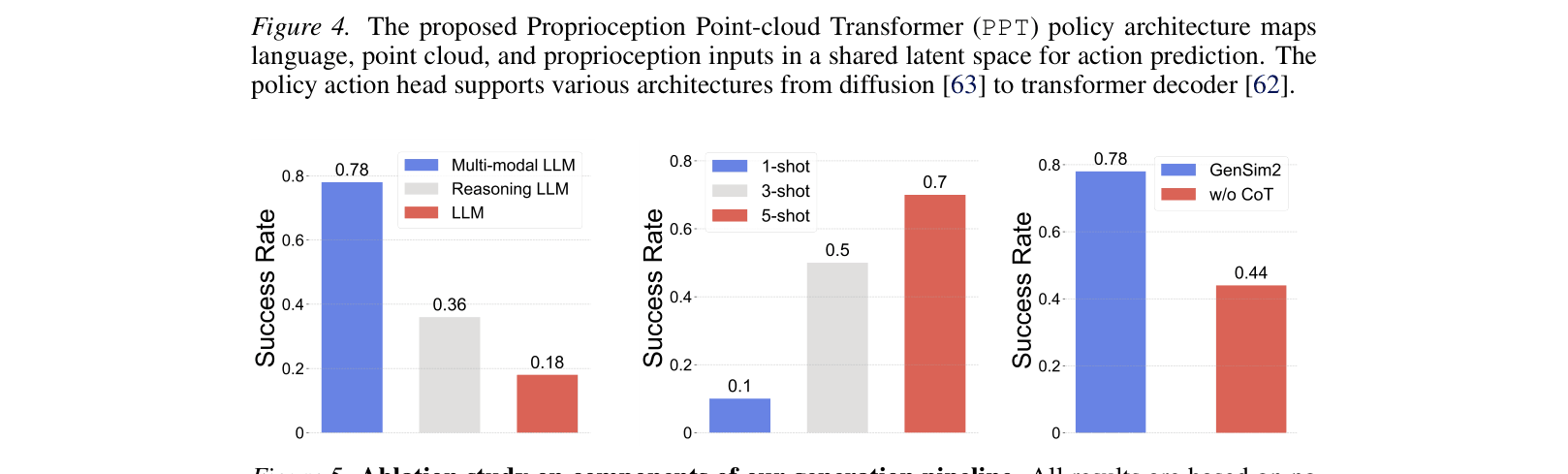
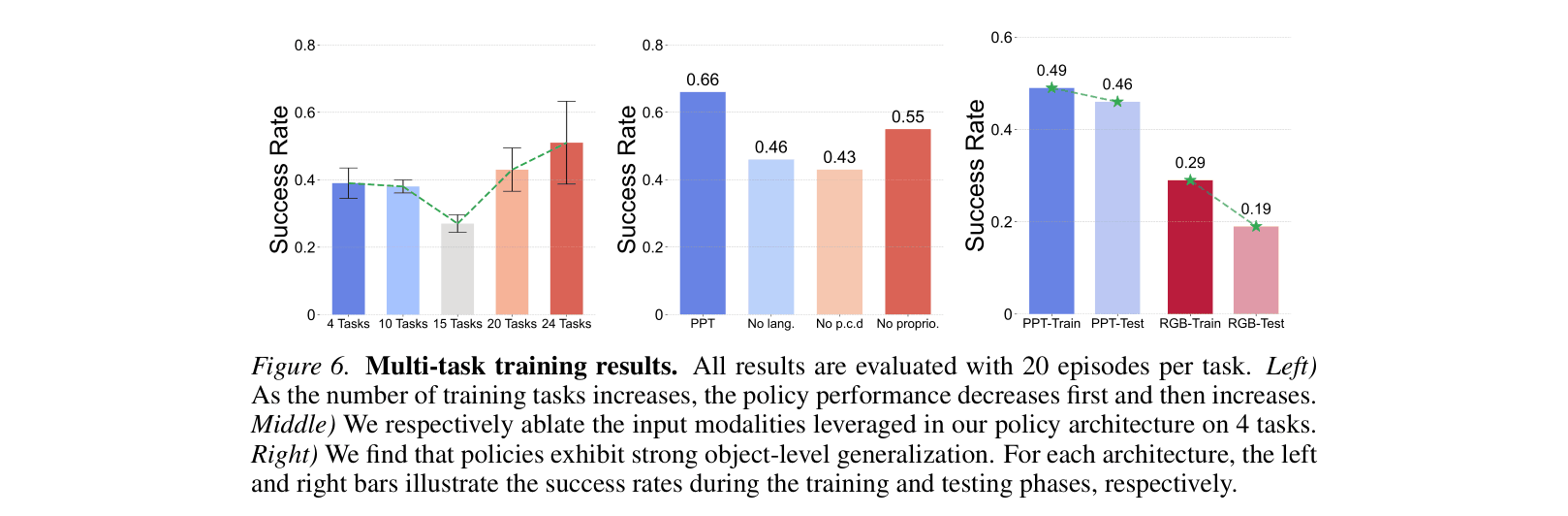
The Proprioception Point-cloud Transformer (PPT) policy architecture used for robot inference.
Evaluation Highlights
- GenSim2-generated data co-trained with real data improves real-world success rates by +21.2% (0.575 vs 0.363) compared to training on real data alone
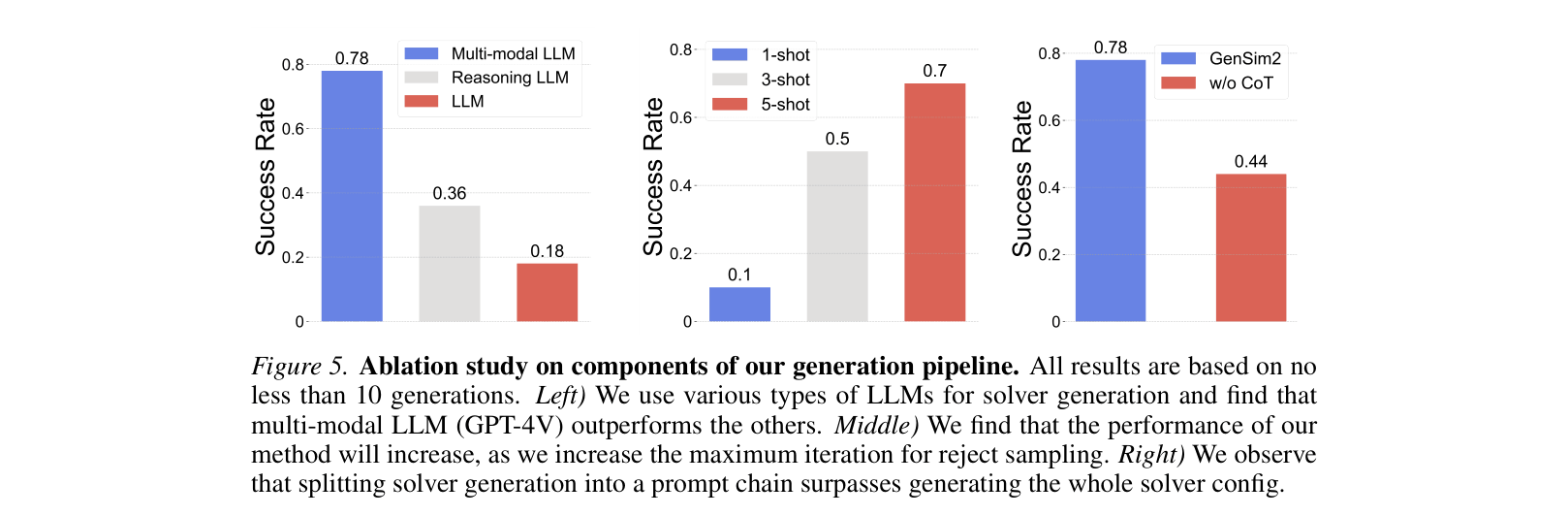
- Achieves 0.60 solution rate on generated long-horizon tasks using reasoning LLMs (o1), significantly outperforming the RoboGen baseline (0.43)
- Primitive task generation achieves 0.78 solution rate, surpassing RoboGen's 0.58 on comparable sub-tasks
Breakthrough Assessment
8/10
Significant advance in automated robotic data generation. Successfully integrates VLM feedback for motion planning (solving a key reliability issue in generative sim) and demonstrates strong sim-to-real results.