📝 Paper Summary
Embodied AI
Robotic Manipulation
Vision-Language-Action (VLA) Models
Fast ECoT accelerates robotic reasoning by caching recurring high-level thoughts and parallelizing reasoning steps, decoupling them from action generation to reduce latency without model retraining.
Core Problem
Embodied Chain-of-Thought (ECoT) requires generating long, sequential reasoning traces autoregressively at every control step, introducing massive latency that makes real-time robotic control impractical.
Why it matters:
- High latency causes robots to idle while 'thinking', slowing down the control loop significantly
- Complex tasks require longer reasoning chains, compounding delays and creating a trade-off between interpretability and responsiveness
- Real-world deployment requires reaction times faster than the seconds-long delays typical of current VLA reasoning models
Concrete Example:
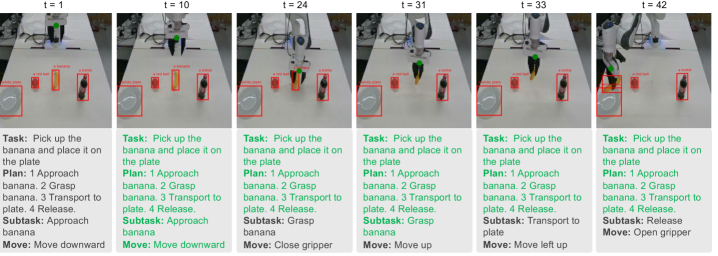
In a standard ECoT setup, a robot might wait ~5 seconds to generate a full plan, sub-goals, and visual features before emitting a simple 'move gripper' action. By the time the action is ready, the environment might have changed, or the motion becomes jerky and slow.
Key Novelty
Fast Embodied Chain-of-Thought (Fast ECoT)
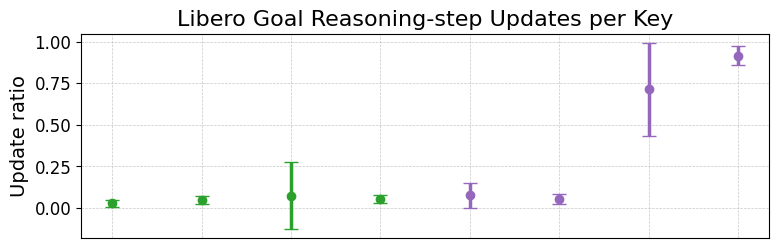
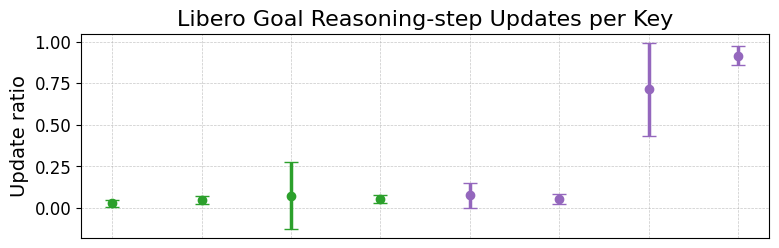
- Exploits 'temporal locality' in robotic reasoning: high-level plans change slowly, so previous reasoning steps can be cached and reused rather than regenerated from scratch
- Converts sequential reasoning dependency into a parallel batch process where multiple reasoning modules (Plan, Sub-task, etc.) are generated simultaneously using cached prefixes
- Decouples action generation from reasoning via an asynchronous scheduler, allowing the robot to act immediately on the latest observation while reasoning updates in the background
Architecture
Comparison between sequential ECoT generation and the proposed Fast ECoT parallel generation framework.
Evaluation Highlights
- Reduces inference latency by up to 7.5× compared to standard ECoT on real-world robot tasks (Standard: ~5.5s vs. Fast ECoT Async: ~0.7s)
- Achieves highest success rate (80.0%) on LIBERO simulation benchmark, surpassing both the original ECoT (74.8%) and non-reasoning OpenVLA (75.8%)
- Maintains high reasoning faithfulness (measured by Action Faithfulness metric), ensuring the accelerated reasoning still accurately reflects the decision-making process
Breakthrough Assessment
8/10
Significantly mitigates the primary bottleneck (latency) of VLA reasoning models without retraining. The asynchronous parallelization strategy is a practical system-level innovation that makes 'thinking' robots viable for real-time control.