📝 Paper Summary
Motion Forecasting
Autonomous Driving
Knowledge Distillation
CoT-Drive distills the reasoning capabilities of GPT-4 into lightweight edge models via Chain-of-Thought prompting to enable real-time, context-aware motion forecasting on resource-constrained devices.
Core Problem
Deep learning models for motion forecasting often fail in corner cases due to poor contextual understanding, while powerful LLMs like GPT-4 are too slow or costly for real-time deployment in vehicles.
Why it matters:
- Online LLMs (e.g., GPT-4) suffer from latency, network instability, and privacy risks, making them unsafe for real-time autonomous driving decisions
- Offline LLMs (e.g., Llama-2) are computationally heavy for edge devices and often lack the reasoning flexibility to handle rare, complex traffic scenarios
- Existing data-driven forecasting models struggle to generalize to unseen environments, compromising safety in heterogeneous traffic
Concrete Example:
In a complex intersection with mixed agents (cyclists, pedestrians), a standard model might miss the subtle interaction cues predicting a cyclist's sudden turn. An online LLM could reason through this but might fail to return a prediction in time due to network lag, causing an accident.
Key Novelty
Teacher-Student Chain-of-Thought Distillation
- Uses GPT-4 Turbo as a 'teacher' to generate rich, step-by-step semantic analysis (Chain-of-Thought) of traffic scenes, covering interaction analysis and risk assessment
- Distills this reasoning capability into a lightweight 'student' language model (Edge LM) that runs locally, enabling it to mimic the teacher's deep understanding without the computational cost
Architecture
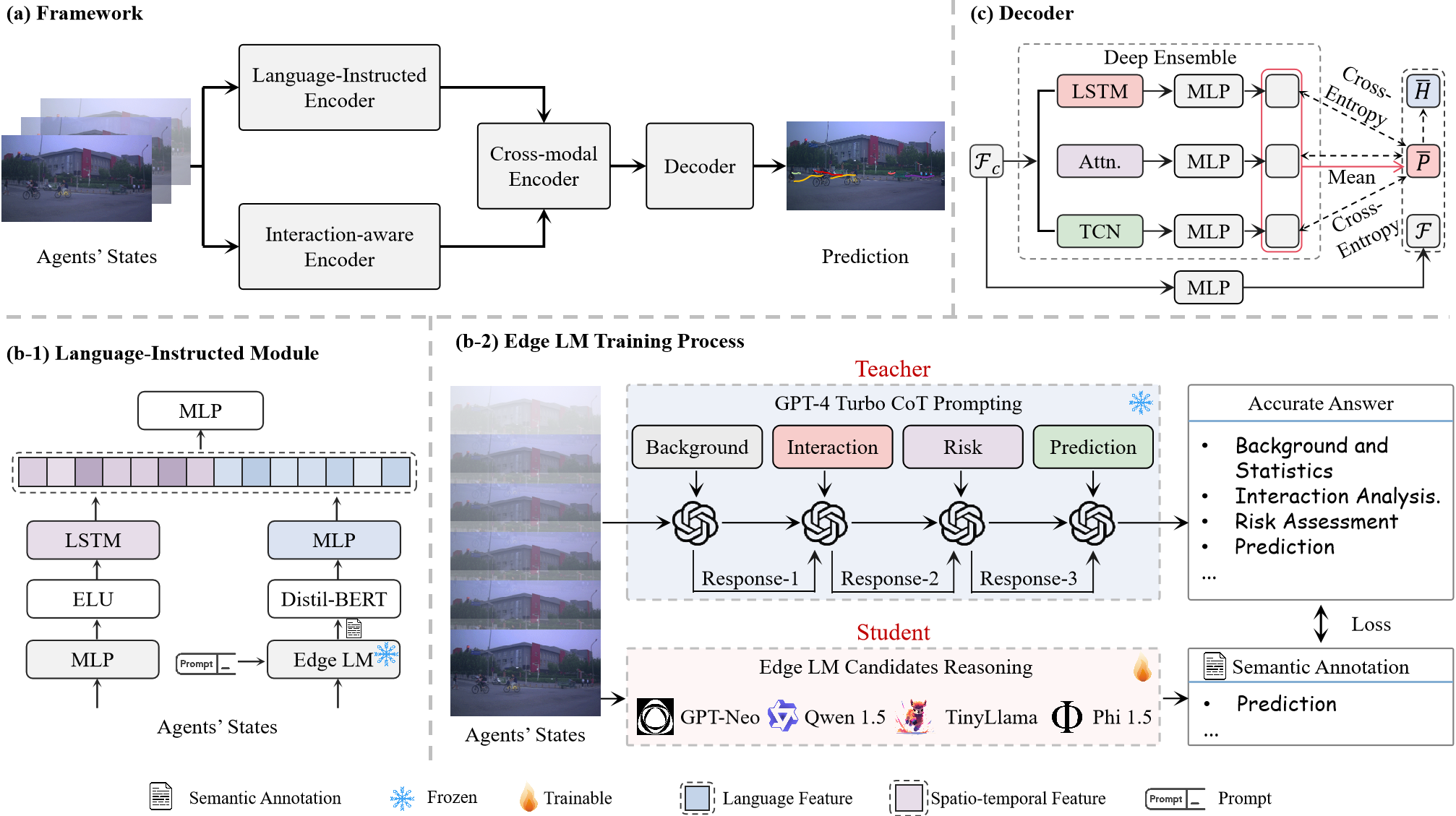
The overall CoT-Drive framework, detailing the encoder-decoder structure and the teacher-student distillation process.
Evaluation Highlights
- Constructed 'Highway-Text' dataset containing over 6,600 annotated scenarios from NGSIM and HighD benchmarks
- Constructed 'Urban-Text' dataset containing over 5,400 annotated samples from MoCAD and ApolloScape benchmarks
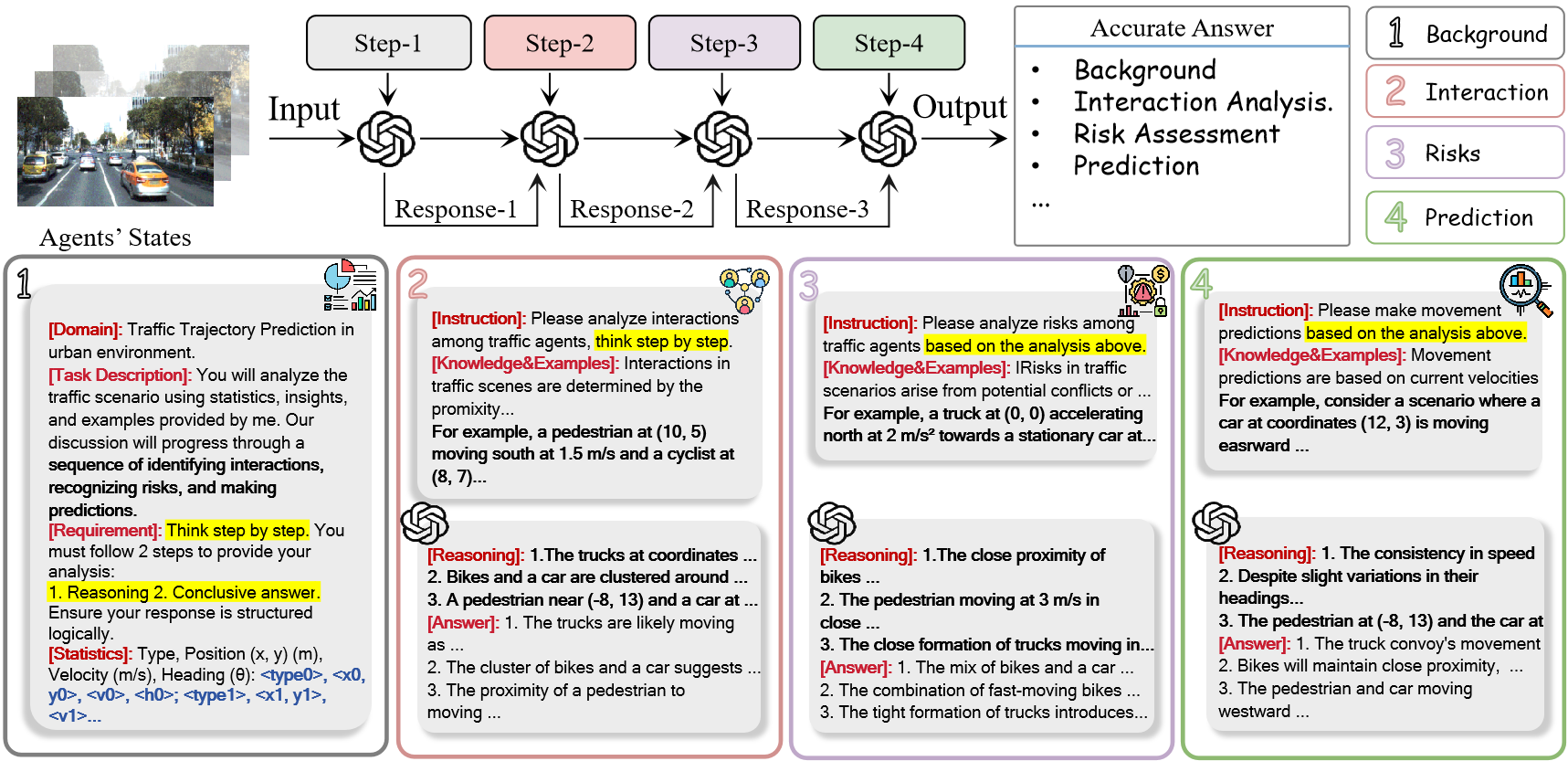
- Proposed a novel zero-shot CoT prompting strategy that breaks scene analysis into four steps: Background, Interaction Analysis, Risk Assessment, and Prediction
Breakthrough Assessment
7/10
Innovative application of LLM distillation for real-time motion forecasting. The creation of large-scale text-description datasets for traffic scenes is a significant contribution, though the core architectural fusion is an incremental improvement on encoder-decoder schemes.