📝 Paper Summary
Autonomous Driving Simulation
World Models
GUMP is a generative world model that uses a key-value tokenization strategy and partial autoregressive decoding to unify scene generation, simulation, and planning in autonomous driving.
Core Problem
Autonomous driving systems lack scalable, realistic simulators; existing learning-based models struggle with long-horizon consistency in closed-loop settings, while rule-based simulators fail to capture complex human-like interactivity.
Why it matters:
- Scalability limits: AD systems struggle to adapt to unseen environments without extensive engineering for failure scenarios.
- Simulation gap: Open-loop predictions cannot adapt to out-of-distribution states encountered during real-world interactions.
- Safety validation: Developing safe policies requires high-fidelity, reactive environments that can generate diverse and rare traffic scenarios.
Concrete Example:
In a complex intersection, an open-loop model might predict a car continues straight regardless of the ego-vehicle's actions. In a closed-loop scenario, if the ego-vehicle aggressively merges, a realistic simulator (like GUMP) should make the other car yield or swerve, rather than colliding blindly as an open-loop prediction would.
Key Novelty
Generative Unified Model for Motion Planning (GUMP)
- Key-Value Tokenizer: Treats agents as 'keys' (ID + category) and their physical properties as 'values' (quantized states), enabling flexible querying and dynamic agent management.
- Partial-Autoregressive Acceleration: Converts intra-frame dependencies to non-autoregressive (NAR) parallel decoding to speed up inference without losing inter-frame causal consistency.
- Unified Downstream Support: A single foundation model acts as a scene generator, a reactive simulator for testing, a planner, and an RL training environment.
Architecture
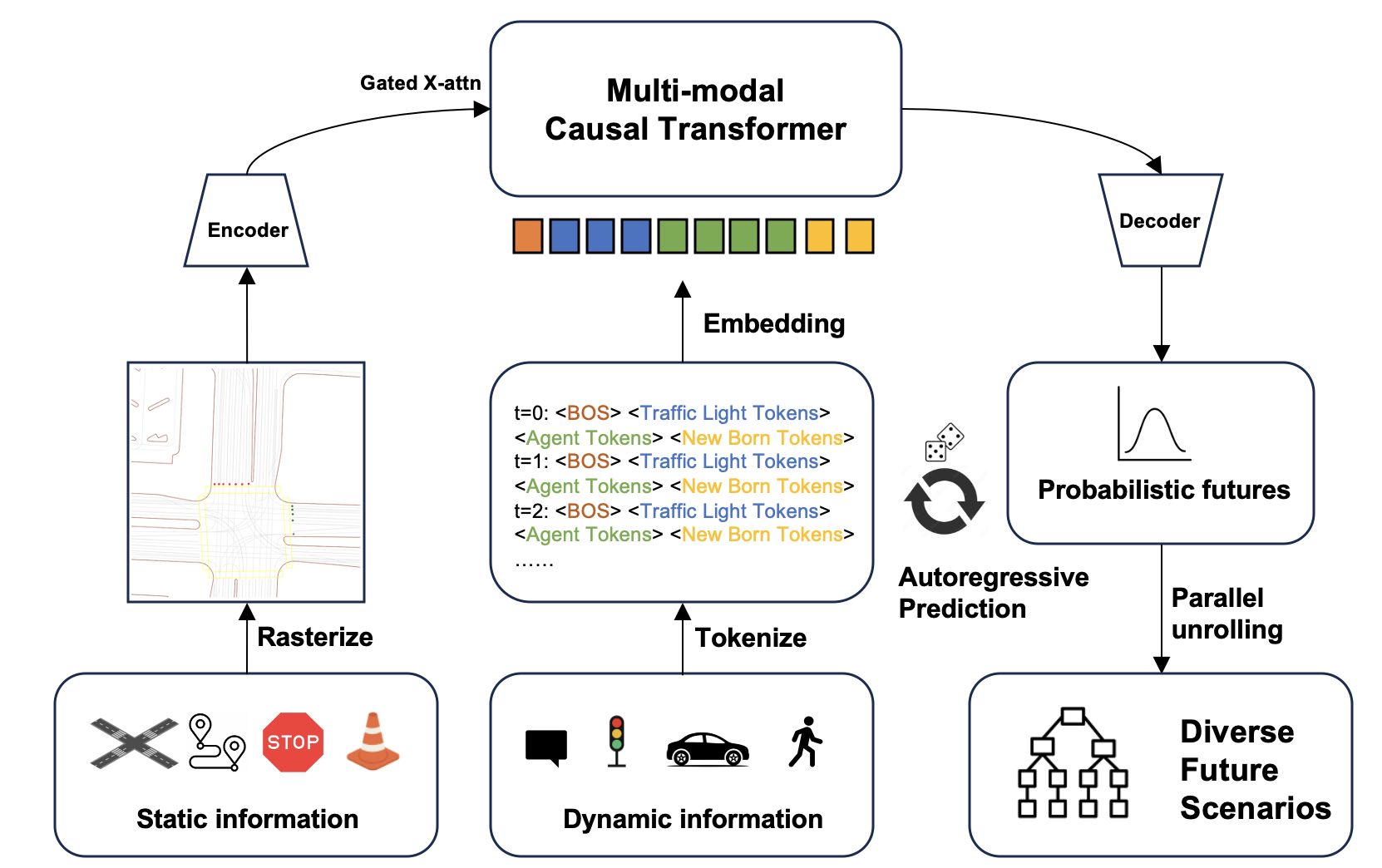
The overall architecture of GUMP, detailing the flow from static/dynamic inputs to the final trajectory decoding.
Evaluation Highlights
- Achieves state-of-the-art performance on simulation realism and scene generation benchmarks (Waymo and nuPlan).
- Planner module based on the world model outperforms prior arts in planning benchmarks.
- Significantly improves inference and training speed via partial-Autoregressive mode while maintaining generative capability.
Breakthrough Assessment
8/10
Proposes a highly versatile architecture that effectively merges simulation, generation, and planning. The key-value tokenization and partial-AR speedup address critical bottlenecks in deploying transformers for real-time AD simulation.