📝 Paper Summary
Autonomous Driving
Multi-Modal Large Language Models (MLLMs)
DriveMLM aligns the linguistic decisions of a multi-modal LLM with standardized behavioral planning states to enable closed-loop autonomous driving in realistic simulators.
Core Problem
Existing LLM-based driving agents produce linguistic outputs that cannot directly control vehicles, preventing closed-loop operation in realistic environments.
Why it matters:
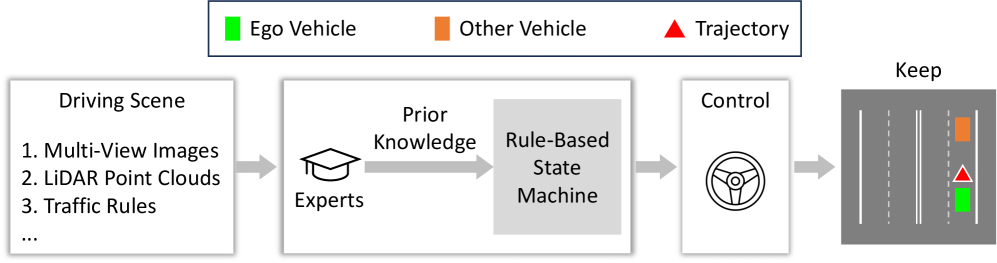
- Traditional modular AD systems lack the semantic understanding to handle corner cases and complex user instructions.
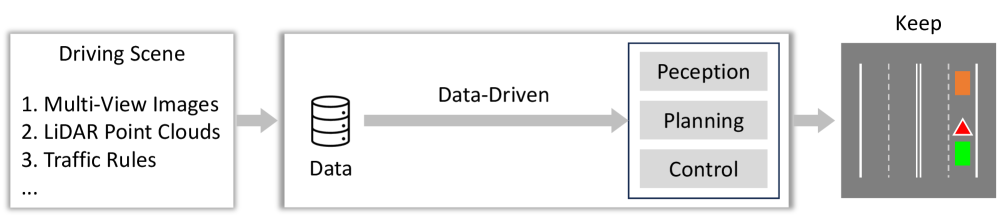
- End-to-end models lack world knowledge and reasoning capabilities found in LLMs.
- Current LLM driving approaches are limited to open-loop QA or trajectory prediction without bridging the gap to actionable control signals.
Concrete Example:
When an ambulance approaches, a standard planner might just follow the lane, whereas a human or LLM knows to yield. However, an LLM's text output 'yield to ambulance' is not a signal the motion controller understands; it needs a specific state like 'RIGHT_CHANGE' or 'DECELERATE'.
Key Novelty
Aligning LLM outputs with Behavioral Planning States
- Bridges the gap between language and control by mapping LLM outputs to the specific decision states (e.g., speed and path modes) used by standard modular planning systems like Apollo.
- Uses a multi-modal tokenizer to unify diverse inputs (LiDAR, images, traffic rules) for the LLM decoder to predict these standardized states alongside explanations.
- Introduces an efficient data engine to collect decision states and explanation annotations from expert driving in simulators without manual frame-by-frame labeling.
Architecture
The DriveMLM framework overview, detailing the inputs, multi-modal tokenizer, MLLM decoder, and the connection to the Apollo motion planner.
Evaluation Highlights
- Achieves 76.1 Driving Score (DS) on CARLA Town05 Long benchmark, outperforming the Apollo baseline by 4.7 points.
- Achieves 0.955 Miles Per Intervention (MPI) on CARLA Town05 Long, which is 1.25 times better than Apollo.
- Demonstrates ability to handle complex instructions (e.g., 'hail an ambulance') where standard modular systems fail.
Breakthrough Assessment
8/10
Significantly advances the field by successfully integrating LLMs into a closed-loop control stack (Apollo) rather than just performing open-loop QA, with strong empirical results on CARLA.