📝 Paper Summary
End-to-end autonomous driving
Trajectory planning
Multi-modal planning
GTRS improves autonomous driving planning by training a scorer on a massive, diverse set of static trajectories and then applying it to fine-grained dynamic proposals during inference.
Core Problem
Existing trajectory scorers struggle to generalize: fixed vocabularies lack fine-grained precision for specific scenes, while dynamic proposals are too narrow to capture broad driving distributions during training.
Why it matters:
- Fixed vocabularies cannot adapt to complex, safety-critical situations requiring precise maneuvers.
- Scorers trained only on small sets of dynamic proposals fail to generalize to unseen trajectory types or environments.
- Robust planning requires handling both the breadth of general driving scenarios and the depth of specific, fine-grained interactions.
Concrete Example:
A fixed vocabulary planner might fail a complex lane change because no pre-defined trajectory fits the gap perfectly. Conversely, a dynamic planner trained on limited data might generate a valid path but score it incorrectly due to distribution shift in a new city.
Key Novelty
Generalized Trajectory Scoring (GTRS)
- Trains a scorer on a 'super-dense' vocabulary (16k trajectories) with dropout to force learning of robust, generalizable features rather than overfitting to specific patterns.
- Combines this robust scorer with a diffusion-based generator at inference time, merging the stability of static priors with the precision of dynamic proposals.
- Uses sensor augmentation (rotations) and refinement training (distilling teacher scores) to handle out-of-domain perceptual shifts.
Architecture
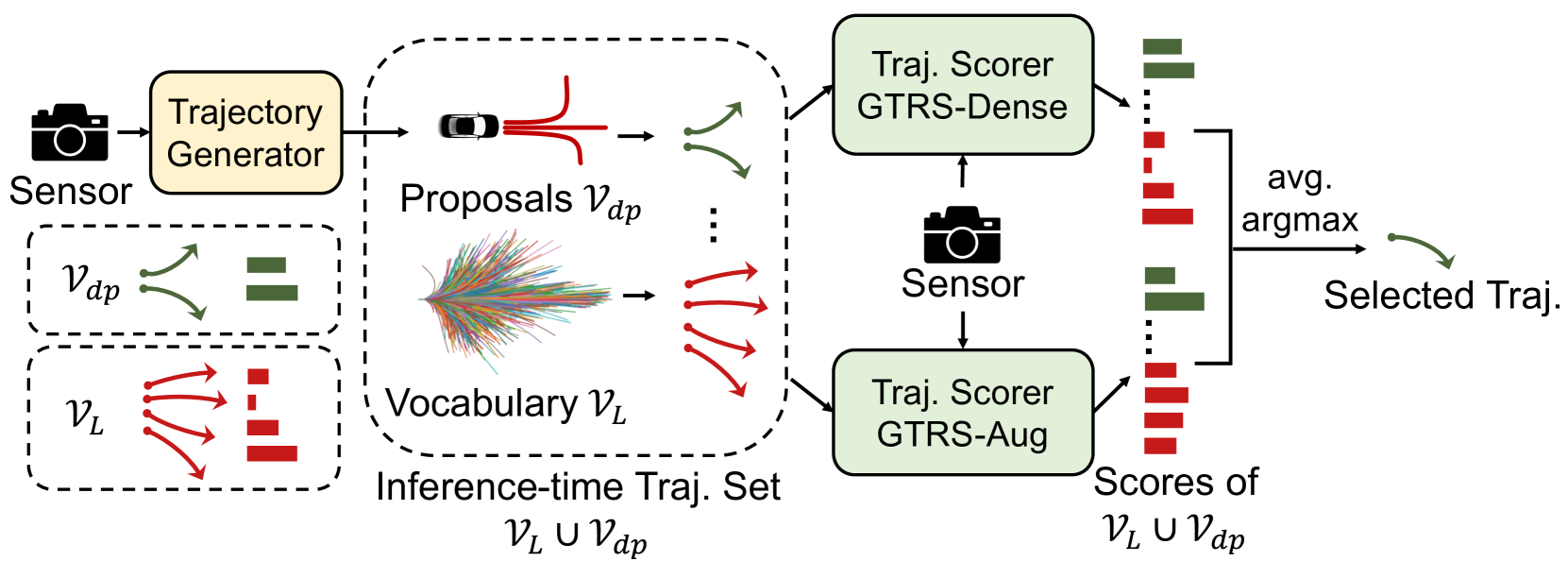
Inference-time integration of the system components.
Evaluation Highlights
- Achieves 49.4 EPDMS on the Navsim v2 Challenge (Navhard split), winning the challenge.
- Approaches the performance of PDM-Closed, a privileged planner using ground-truth data, despite relying on sub-optimal synthetic sensor inputs.
- Zero-shot generalization: The scorer trained on static trajectories outperforms a random selection baseline on dynamic proposals by +11.1 EPDMS.
Breakthrough Assessment
8/10
Significant practical advance winning a major challenge. Cleverly decouples training (breadth via static vocabulary) from inference (precision via dynamic generation), solving a key generalization bottleneck.