📝 Paper Summary
End-to-End Autonomous Driving
Trajectory Planning
MomAD stabilizes autonomous driving trajectories by explicitly integrating momentum—aligning current plans with historical paths and aggregating past perception context to prevent erratic control shifts.
Core Problem
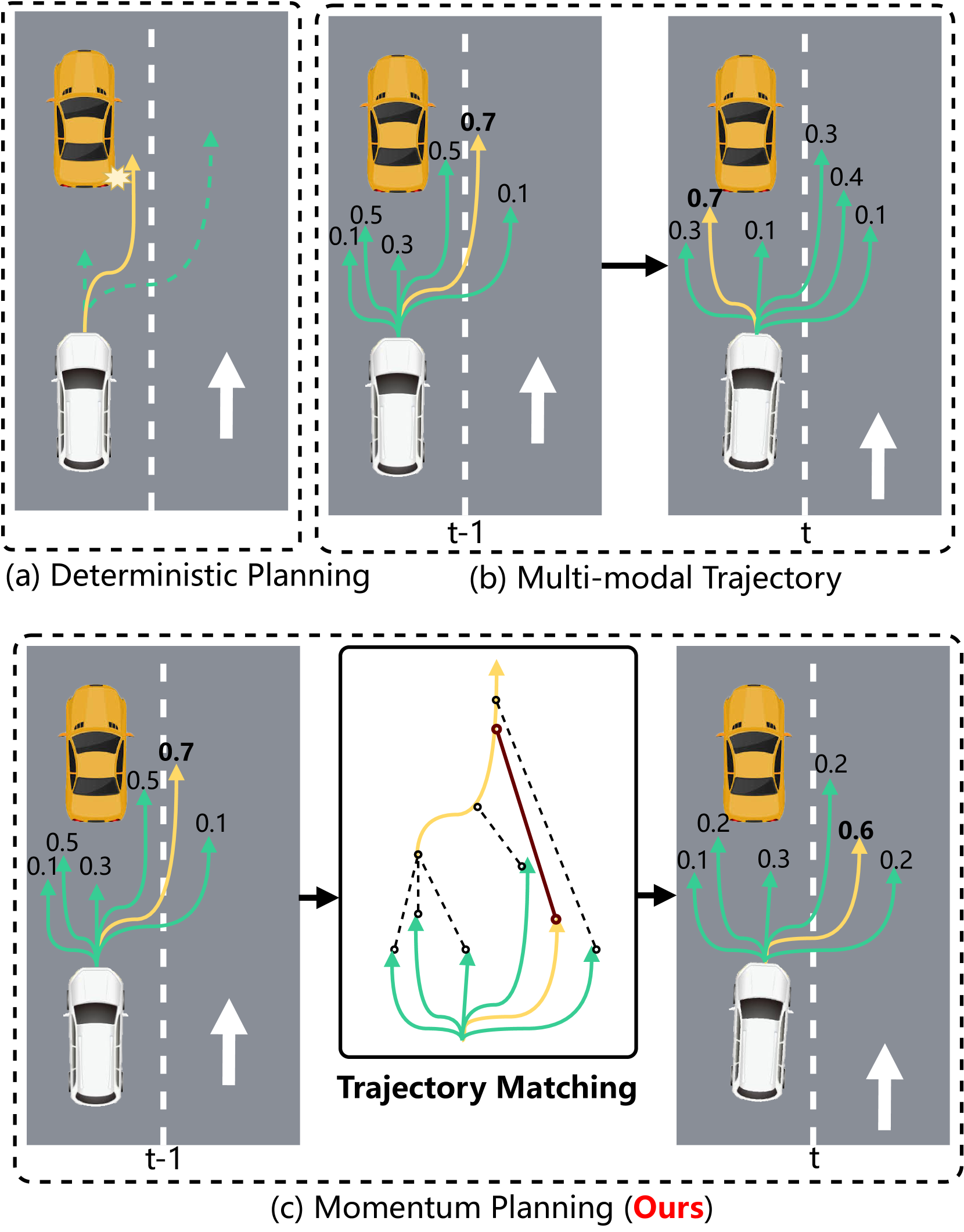
Current end-to-end planners rely on one-shot predictions from single-frame perception, leading to temporal inconsistency (jittery control), vulnerability to occlusions, and lack of long-horizon stability.
Why it matters:
- Inconsistent predictions cause 'shaking' (sudden directional shifts), leading to uncomfortable and unsafe driving experiences.
- One-shot multi-modal predictions are susceptible to noise and temporary occlusions, potentially causing the planner to switch abruptly between conflicting trajectories.
- Without temporal coherence, vehicles may fail to maintain steady progress during complex maneuvers like turns.
Concrete Example:
In a turning scenario, a standard planner might predict a smooth left turn at frame t, but at frame t+1—due to a momentary detection error—it might suddenly predict a straight path. This discontinuity forces the vehicle to jerk or 'shake' the wheel, increasing collision risk.
Key Novelty
Momentum-Aware Driving (MomAD)
- Introduces 'Trajectory Momentum': Uses Hausdorff Distance to select the candidate trajectory that best preserves the shape and topology of the previous time step's path, ensuring smooth motion.
- Introduces 'Perception Momentum': A module that cross-attends current planning queries with historical ones, allowing the model to 'remember' past context (like occluded agents) and refine predictions.
Architecture
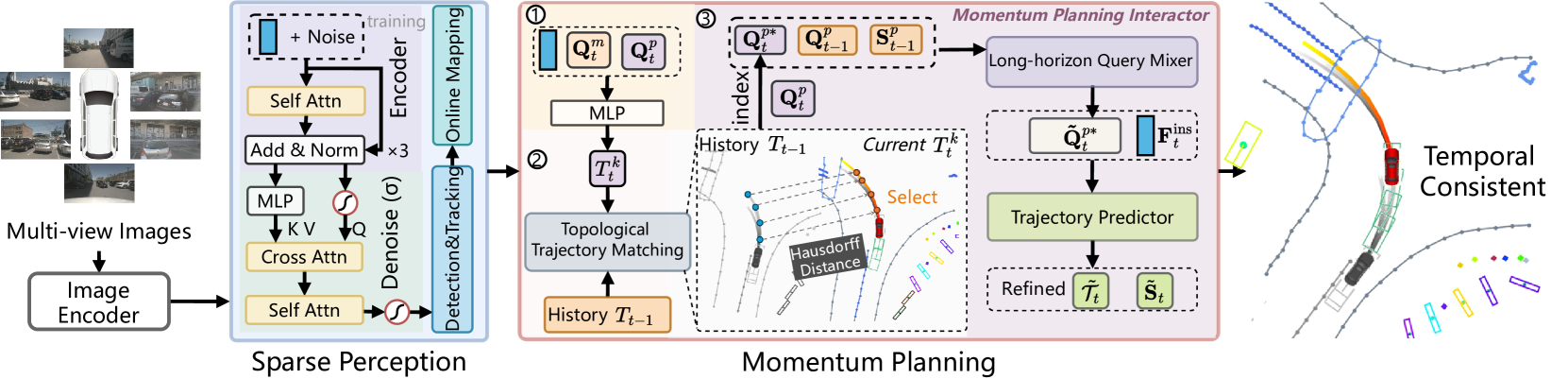
Overview of the MomAD framework, detailing the Sparse Perception module, the Trajectory Prediction loop, and the two core momentum components: TTM and MPI.
Evaluation Highlights
- Reduces collision rate by 26% compared to SparseDrive on the curated Turning-nuScenes validation set (6-second prediction horizon).
- Improves Trajectory Prediction Consistency (TPC) by 33.45% (0.97m) over SparseDrive on Turning-nuScenes, demonstrating significantly more stable planning.
- Achieves up to 16.3% improvement in success rate on the closed-loop Bench2Drive benchmark.
Breakthrough Assessment
8/10
Addresses the critical and often overlooked problem of temporal consistency in end-to-end driving. The explicit modeling of 'momentum' offers a physics-grounded solution that significantly boosts stability and safety.